1. 引言
平衡二叉树(Balanced Binary Tree)是二叉搜索树的一种优化形式,旨在提升查找效率。
在实际开发中,普通的二叉树结构在极端情况下(如插入有序数据)会导致退化为链表,查找效率从理想的 O(log n) 退化到 O(n)。为了解决这个问题,我们引入了平衡二叉树。
本文将重点介绍三种常见的平衡二叉树:
- AVL 树
- 红黑树(Red-Black Tree)
- 权重平衡树(Weight-Balanced Tree)
它们通过不同的平衡策略确保树的高度始终维持在 O(log n) 级别。
2. 二叉树与二叉搜索树
二叉树(Binary Tree) 是每个节点最多有两个子节点的树结构:左子节点和右子节点。
2.1. 二叉搜索树(Binary Search Tree, BST)
BST 是一种特殊的二叉树,其性质如下:
- 对于任意节点 x:
- 左子树中所有节点的值 < x 的值
- 右子树中所有节点的值 ≥ x 的值
例如:
这种结构使得查找效率大幅提升,但在极端情况下(如插入有序数据)会导致树高度为 O(n),如下图所示:
总结:
- BST 的查找、插入、删除平均复杂度为
O(log n) - 最坏情况下退化为
O(n),需要引入平衡机制
3. 平衡二叉树概述
平衡二叉树 是一种 BST,它通过一定的规则保持树的高度始终在 O(log n) 范围内。
特点:
- 插入或删除后会自动进行“再平衡”操作
- 查找、插入、删除操作的时间复杂度始终为
O(log n)
虽然平衡操作会带来一定的性能开销,但换来的是更稳定的查询性能,适用于对性能要求较高的场景。
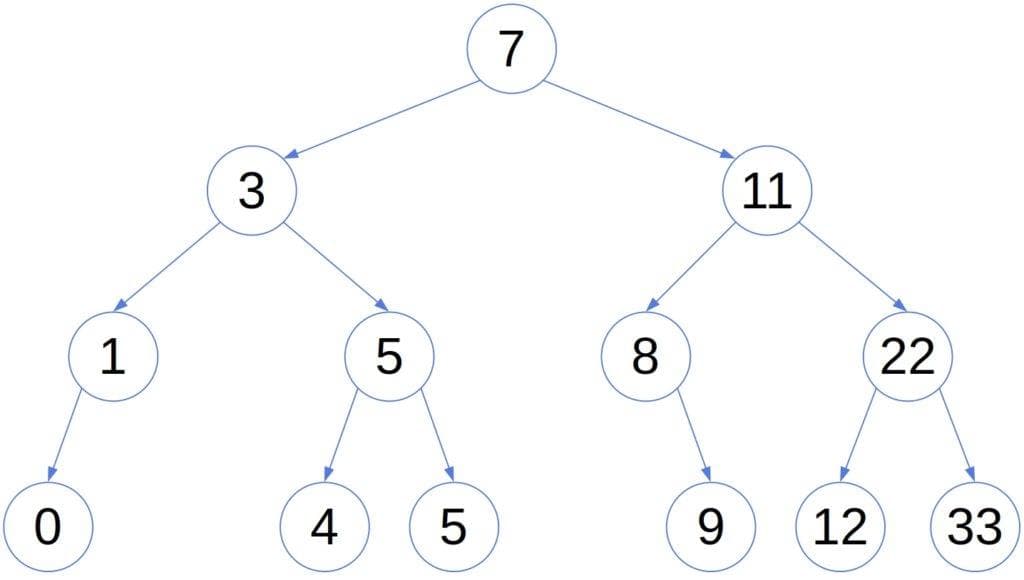
4. AVL 树
AVL 树是最古老的自平衡二叉搜索树之一。
平衡定义:
一个节点被认为是平衡的,当且仅当其左右子树的高度差不超过 1。
公式表示如下:
|height(left) - height(right)| ≤ 1
示例:
平衡性证明(略):
AVL 树的最小节点数与高度呈指数关系,最终可推导出树的高度为 O(log n)。
优点:
- 高度严格平衡,查找效率高
- 适合频繁查找、少量插入/删除的场景
缺点:
- 插入/删除时需要频繁调整,维护成本高
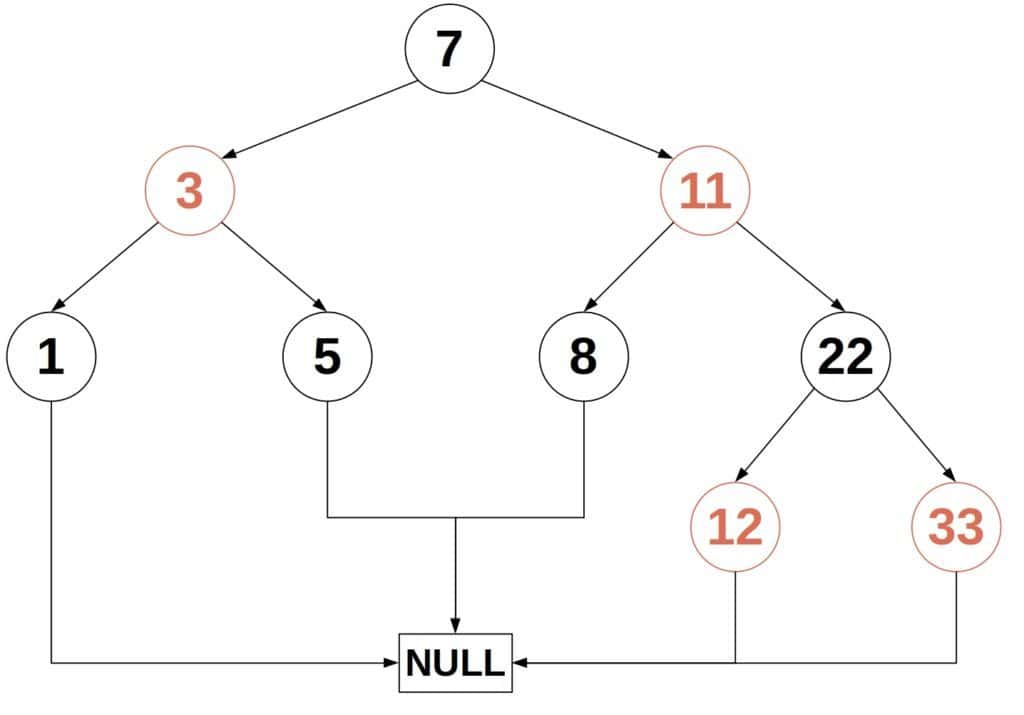
5. 红黑树(Red-Black Tree)
红黑树是一种更实用的平衡二叉搜索树结构,广泛用于 Java、C++ STL 等标准库中。
平衡特性(5条规则):
- 每个节点是红色或黑色
- 根节点是黑色
- 所有叶子节点(NULL)是黑色
- 如果一个节点是红色,那么它的两个子节点必须是黑色
- 从任意节点到其每个叶子的所有路径都包含相同数量的黑色节点
示例:
平衡性证明(略):
红黑树通过上述规则保证最长路径不超过最短路径的两倍,从而保证树的高度为 O(log n)。
优点:
- 插入/删除比 AVL 树更高效
- 更适合频繁插入/删除的场景
缺点:
- 查找效率略低于 AVL 树
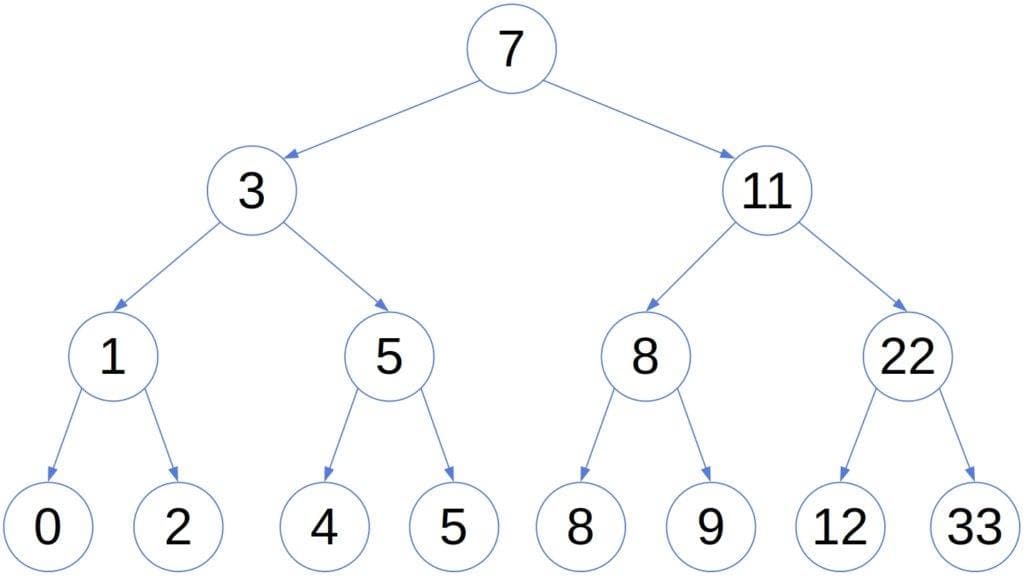
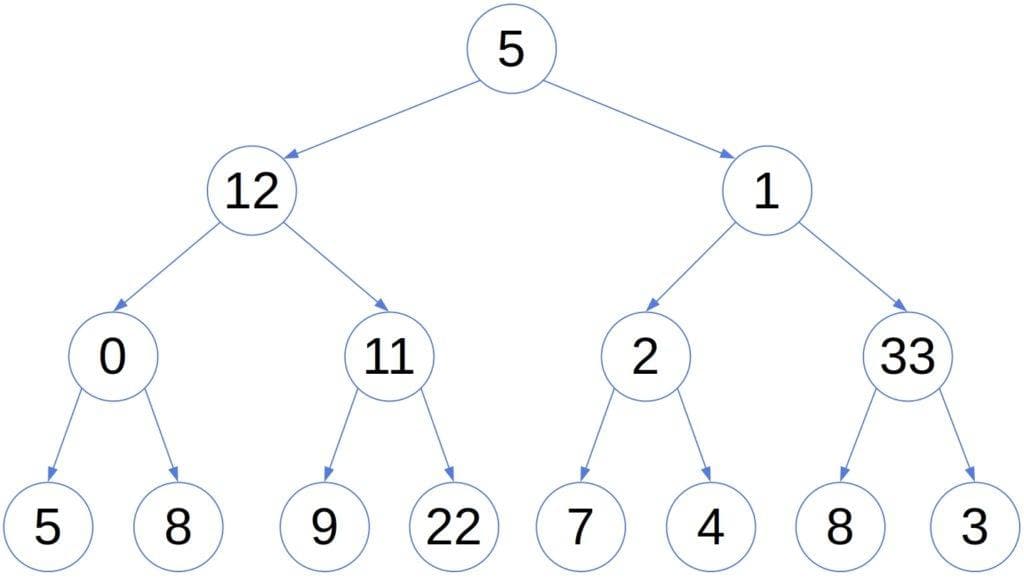
6. 权重平衡树(Weight-Balanced Tree, WBT)
WBT 与 AVL、红黑树不同,它通过控制子树中叶子节点数量的比例来实现平衡。
平衡定义:
设节点 x 的左右子树分别为 x' 和 x'',若:
leaves(x'') / leaves(x') ≤ β ∈ (0, 1)
并且所有后代节点都满足该条件,则称该节点是平衡的。
等价于存在 α ∈ (0, 1),使得:
leaves(x.left) ≥ α * leaves(x)
leaves(x.right) ≥ α * leaves(x)
示例:
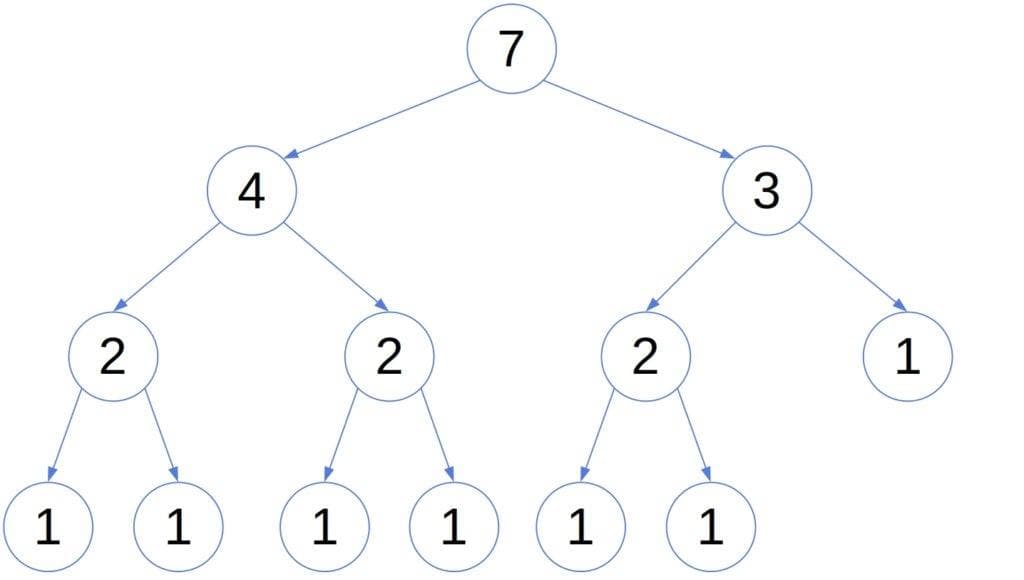
其中每个节点内的数字表示该子树的叶子节点数。
平衡性证明(略):
通过归纳法可以证明,WBT 的高度也为 O(log n)。
适用场景:
- 需要动态维护节点权重比例的场景
- 如某些数据库索引结构、持久化数据结构中
7. 总结
| 类型 | 平衡方式 | 插入/删除性能 | 查找性能 | 适用场景 |
|---|---|---|---|---|
| AVL 树 | 高度差 ≤ 1 | ❌较慢(频繁旋转) | ✅最快 | 查找频繁,插入/删除少 |
| 红黑树 | 黑高一致、红节点无连续 | ✅较快 | ✅较快 | 通用,如 Java TreeMap |
| 权重平衡树 | 子树叶子比例 | ✅较快 | ✅较快 | 权重敏感场景 |
一句话总结:
平衡二叉树通过不同的平衡策略保证树的高度始终为
O(log n),从而确保查找、插入、删除操作的高效性。选择哪种结构取决于具体应用场景和性能需求。