1. 概述
在计算机科学中,存在大量具有有限但规模庞大的可行解集合的优化问题。其中一些问题,如图中最短路径(Bellman-Ford)、最小生成树(MST),可以在多项式时间内求解。
但还有相当一部分问题,比如生产计划、机组调度等,无法在多项式时间内求解,属于 NP-Hard 类问题,属于 组合优化问题(Combinatorial Optimization)。
分支限界法(Branch and Bound)是一种广泛用于解决此类问题的算法范式。
本文将深入讲解分支限界算法的原理、应用场景及其实现方式。
2. 基本思想
分支限界算法用于解决组合优化、离散优化和一般数学优化问题。给定一个 NP-Hard 问题,它通过遍历所有可能的解空间来找到最优解。
核心思想是构建一棵决策树(Decision Tree),树的根节点代表整个解空间:
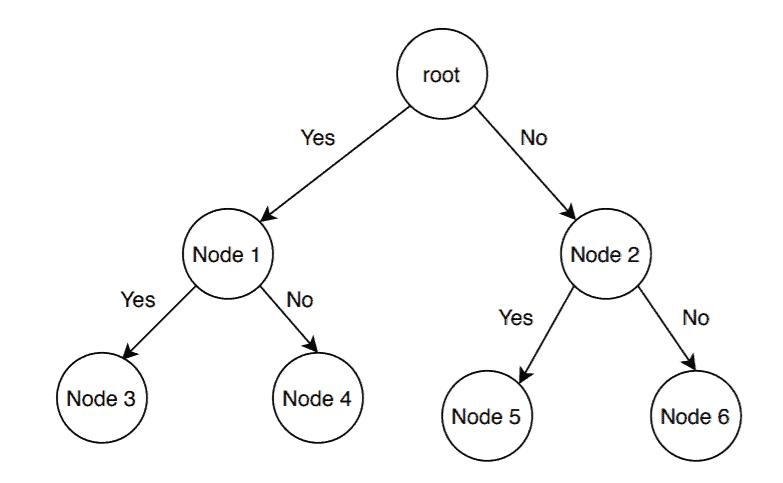
每个子节点代表一个部分解。在构建树的过程中,我们需要为问题设置上界(Upper Bound)和下界(Lower Bound):
- 上界:可以通过局部优化方法或随机选取一个解来估算
- 下界:通常通过凸松弛(Convex Relaxation)或对偶(Duality)方法获得
在每层遍历中,我们优先探索具有最优界的节点,从而更快找到最优解。
因此,寻找一个高质量的上下界是分支限界法的关键。
3. 分支限界适合哪些场景?
分支限界法在以下情况下表现良好:
✅ 离散优化问题:变量必须属于离散集合,例如 0-1 整数规划、网络流问题等。
✅ 组合优化问题:在离散且庞大的解空间中寻找目标函数的极值,例如布尔可满足性问题(SAT)、整数线性规划(ILP)等。
这类问题通常无法通过贪心或动态规划高效求解,而分支限界法能在合理时间内找到最优解或近似最优解。
4. 分支限界算法示例:任务分配问题
4.1 问题描述
假设我们有 3 个工人 A、B、C 和 3 个任务 Job 1~3,每个工人完成每个任务的代价如下表所示:
| Job 1 | Job 2 | Job 3 | |
|---|---|---|---|
| A | 9 | 3 | 4 |
| B | 7 | 8 | 4 |
| C | 10 | 5 | 2 |
每个工人只能分配一个任务,每个任务只能分配给一个工人。目标是使总代价最小。
4.2 算法伪代码
algorithm MinCost(M):
// INPUT
// M = The cost matrix
// OUTPUT
// The optimal job assignment minimizing the total cost
while true:
E <- LeastCost()
if E is a leaf node:
print(E)
return
for each child S of E:
Add(S)
S.parent <- E
说明:
M是输入的代价矩阵MinCost()维护一个活跃节点列表LeastCost()返回当前活跃节点中代价最小的节点Add()计算新节点代价并加入列表
4.3 算法流程图
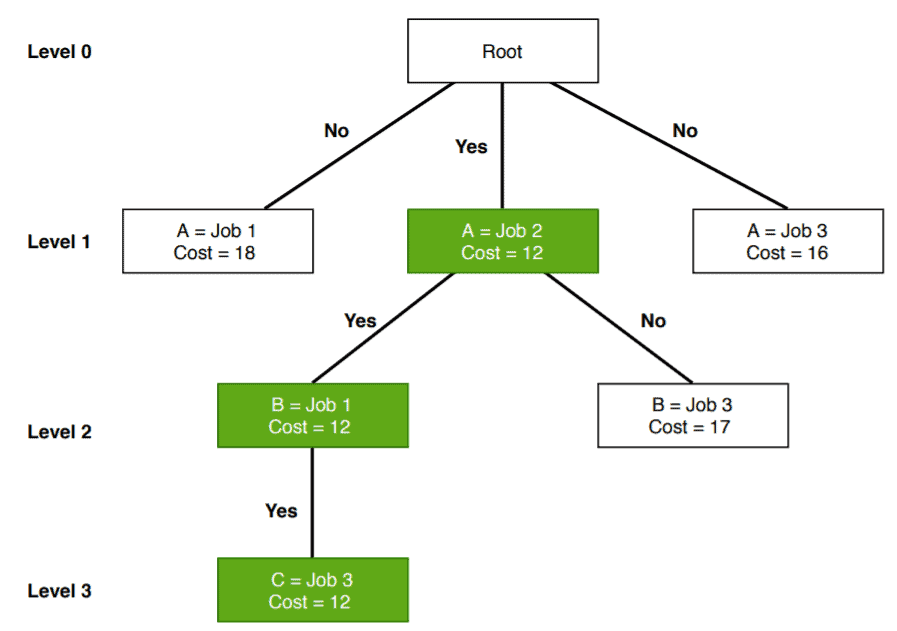
流程说明:
- 初始状态下,工人 A 可以分配任意任务,构建第一层节点并计算代价
- 选择代价最小的节点继续扩展,即分配 Job 2 给 A
- 剩余两个任务分配给 B 和 C,继续计算各节点代价
- 最终得出最优解:A 分配 Job 2,B 分配 Job 1,C 分配 Job 3,总代价为 12
5. 优点
- ✅ 时间复杂度较低:相比暴力枚举,分支限界通过剪枝策略减少无效搜索路径
- ✅ 能找到最优解:在问题规模适中时,可以确保找到全局最优解
- ✅ 路径唯一:不会重复访问节点,搜索路径清晰简洁
6. 缺点
- ❌ 时间开销大:对于大规模问题,节点数量可能指数级增长
- ❌ 难以并行化:分支限界依赖于对解空间的顺序探索,难以并行处理
7. 总结
分支限界法是一种广泛应用于组合优化问题的经典算法。它通过构建决策树并利用上下界剪枝策略,在合理时间内找到最优解。
适用场景包括但不限于:
- 0-1 整数规划
- 网络流问题
- 布尔可满足性问题(SAT)
- 任务分配问题
虽然在大规模问题中存在性能瓶颈,但在中等规模下,它依然是求解 NP-Hard 问题的有力工具。在实际开发中,结合问题特性设计高效的剪枝策略,可以显著提升算法效率。