1. 简介
在图像处理和计算机视觉领域,目标与摄像头之间的距离估算一直是研究热点之一。
本文我们将演示一种经典的解决方案:使用三角相似法(Triangle Similarity Method)计算从摄像头到已知目标的距离。这是一种在计算机视觉文献中被广泛采用的技术,实现简单且效果可靠。
2. 基于视频的目标距离测量原理
近年来,随着摄像头的普及(尤其是智能手机的普及),目标尺寸估算和目标与摄像头之间的距离测量技术得到了广泛应用。如果目标的实际尺寸已知,计算距离的过程其实非常直观,只需理解摄像头的基本成像原理即可。
我们采用的测量方法基于三角相似原理,是目前计算机视觉中最为成熟和有效的方法之一。
为了更直观地说明原理,我们来看一个具体场景:目标上贴有一个已知尺寸的标记物(marker),我们通过图像中的标记尺寸来反推出距离。
下图展示了三角相似法的基本模型:
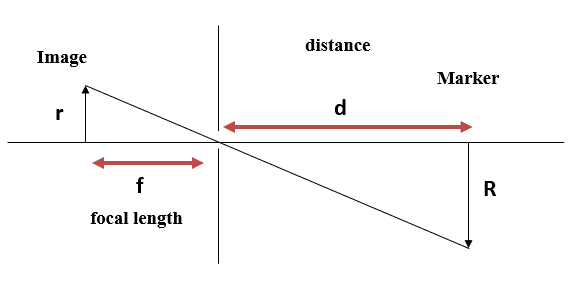
图中涉及以下关键参数:
- f:摄像头焦距(focal length)
- r:图像平面上标记的半径(radius in image plane)
- R:实际空间中标记的半径(radius in object plane)
- d:我们要求解的距离(distance from camera to object)
根据相似三角形原理,我们可以推导出如下公式:
$$ \frac{f}{d} = \frac{r}{R} $$
进而得到:
$$ d = f \cdot \frac{R}{r} $$
这个公式就是我们后续计算距离的核心依据。
3. 示例:距离计算演示
我们来看一个具体示例,演示如何使用上述公式计算距离。
假设摄像头焦距 $ f = 30mm $,目标上的标记实际半径 $ R = 1m $,而在图像中检测到该标记的半径为 $ r = 10cm $。
代入公式:
$$ d = 30mm \cdot \frac{1m}{10cm} $$
单位统一后计算:
$$ d = 300mm \cdot \frac{100cm}{10cm} = 3000mm = 30cm = 0.3m $$
✅ 最终计算结果:目标距离摄像头约 30cm(0.3 米)
这个计算过程简单高效,非常适合在视频流中实时处理。
4. 应用场景与相关方法
目标距离测量广泛应用于多个领域,尤其在自动驾驶、无人机、机器人等新兴技术中尤为重要。
例如:
- 自动驾驶车辆需要识别前方障碍物并判断距离,以做出安全决策
- 无人机需要感知周围环境,避免碰撞
- 机器人导航与避障系统也依赖于对目标距离的精确估计
目前常用的测距技术包括:
- ✅ 雷达(Radar):利用电磁波反射测距,适合远距离和低光环境,但精度随距离增加下降
- ✅ 激光雷达(LiDAR):通过激光反射测量距离、形状和材质,精度高但成本较高
4.1 其他常用测距方法
除了三角相似法外,还有一些其他方法在特定场景下也有应用:
| 方法 | 说明 |
|---|---|
| 复对数映射法(CLM) | 将图像坐标转换为极坐标,适用于纹理表面的距离估算 |
| 基于单目摄像头的深度估计 | 利用摄像头参数和图像几何关系估算距离 |
| 可变俯仰角优化法 | 通过改变摄像头角度,结合像素变化和角度变化优化距离计算 |
这些方法各有优劣,选择时需根据具体应用场景和硬件条件进行权衡。
5. 总结
距离测量是计算机视觉和人工智能领域的重要研究方向。本文我们重点介绍了如何使用三角相似法,通过已知尺寸的目标来计算摄像头与目标之间的距离。
该方法实现简单、计算高效,非常适合嵌入式系统或视频流处理场景。同时我们也简要介绍了其他一些主流方法及其适用场景,供读者在实际项目中参考。
✅ 关键点总结:
- 三角相似法适用于已知尺寸的目标
- 距离计算公式为:$ d = f \cdot \frac{R}{r} $
- 焦距、目标实际尺寸和图像中目标尺寸是必需参数
- 该方法可用于实时视频处理,适合嵌入式部署
如果你正在开发目标识别或距离估算相关功能,不妨先从这个方法入手,作为快速验证的起点。