1. 概述
在本篇文章中,我们将探讨当图中存在负权边时,使用 Dijkstra 算法可能遇到的两个问题:
- 无限循环(Infinite Cycles):如果图中包含负权环,Dijkstra 算法将无法终止。
- 错误路径选择(Wrong Path):即使没有负权环,Dijkstra 也可能无法找到真正的最短路径。
我们先快速回顾 Dijkstra 算法的基本原理和实现逻辑,再深入分析其在负权图中的失效原因。
2. Dijkstra 算法回顾
2.1. 核心思想
Dijkstra 算法是一种贪心算法,用于计算单源最短路径(Single Source Shortest Path, SSSP)。给定一个图 G(V, E),其中:
- V 表示节点数量
- E 表示边的数量
- 每条边都有一个非负权重(weight)
Dijkstra 会从一个指定的源节点出发,计算到图中所有其他节点的最短路径。
⚠️ 注意:Dijkstra 的正确性依赖于所有边的权重为非负数。
2.2. Java 实现示例
public class Dijkstra {
public static int[] dijkstra(int V, int source, List<List<Edge>> adj) {
int[] cost = new int[V];
Arrays.fill(cost, Integer.MAX_VALUE);
cost[source] = 0;
PriorityQueue<Edge> pq = new PriorityQueue<>(Comparator.comparingInt(e -> e.weight));
pq.add(new Edge(source, 0));
while (!pq.isEmpty()) {
Edge current = pq.poll();
int u = current.to;
for (Edge edge : adj.get(u)) {
int v = edge.to;
int newCost = cost[u] + edge.weight;
if (newCost < cost[v]) {
cost[v] = newCost;
pq.add(new Edge(v, newCost));
}
}
}
return cost;
}
static class Edge {
int to, weight;
Edge(int to, int weight) {
this.to = to;
this.weight = weight;
}
}
}
2.3. 正确性证明(简要)
Dijkstra 基于一个贪心思想:当前已知的最短路径是不可被超越的。也就是说,一旦某个节点被从优先队列中取出,它的最短路径就已经确定,后续不会再更新。
✅ 这个假设在所有边权为非负时成立。
但如果存在负权边,就可能出现后续路径总权值更小的情况,从而导致 Dijkstra 无法正确计算最短路径。
3. 问题一:无限循环(Infinite Cycles)
3.1. 问题描述
当图中存在负权环(Negative Cycle)时,Dijkstra 会陷入无限循环,无法终止。
✅ 负权环:图中一个环路,其所有边的总权值为负。
3.2. 示例图
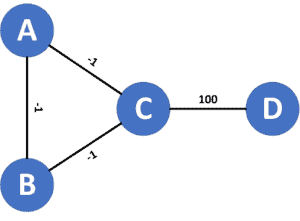
图中节点 A 为源点。运行 Dijkstra 后:
- A → B → C → A 形成一个负权环
- 每次更新都会产生更小的 cost,导致无限循环
3.3. 踩坑提醒
❌ Dijkstra 不适用于包含负权环的图。遇到此类图,算法将永远运行下去。
4. 问题二:错误路径(Wrong Path)
4.1. 问题描述
即使图中没有负权环,只要存在负权边,Dijkstra 也可能选择错误路径,导致最终结果不准确。
4.2. 示例图
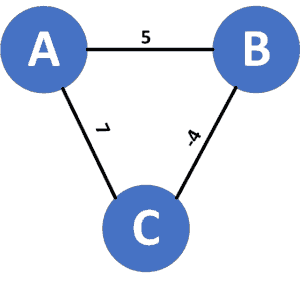
图中节点 A 为源点:
- A → B 边权为 5
- A → C 边权为 7
- C → B 边权为 -4
Dijkstra 会先选 A → B(权值 5),但其实 A → C → B 的总权值是 3,更优。
4.3. 原因分析
Dijkstra 一旦将节点从优先队列中取出,就认为其最短路径已确定,不再更新。因此:
❌ Dijkstra 无法回溯更新已处理节点的最短路径,无法处理负权边带来的“后发优势”。
5. 总结
| 问题类型 | 是否会终止 | 是否能给出正确结果 | 说明 |
|---|---|---|---|
| 存在负权环 | ❌ 否 | ❌ 否 | 无限循环 |
| 存在负权边 | ✅ 是 | ❌ 否 | 可能选错路径 |
| 所有边权非负 | ✅ 是 | ✅ 是 | 标准适用场景 |
✅ 替代方案建议
- 如果图中存在负权边或负权环,应使用 Bellman-Ford 算法 或 SPFA(Shortest Path Faster Algorithm)
- Dijkstra 只适用于非负权图
💡 提示:如果你不确定图中是否存在负权边,优先选择 Bellman-Ford 或 SPFA。