1. 概述
判断一个给定的多边形顶点列表是顺时针(Clockwise)还是逆时针(Counterclockwise)顺序,有多种方法可以实现。
在本文中,我们将构建一个简单的算法来判断多边形顶点的排列方向。同时,我们会回顾并使用一些用于计算多边形面积的公式。假设读者已经具备基本的多边形知识和线性代数基础。
2. 多边形顶点顺序
我们先回忆一下多边形在内存中的存储方式。设多边形为 P,它由 n 个点组成。我们可以将 P 表示为:
$$ P = (P_0, P_1, ..., P_{n-1}) $$
其中每个点 $ P_i = (x_i, y_i) $。
我们再定义另一个多边形 $ P' = (P_{n-1}, P_{n-2}, ..., P_0) $,它由相同的点但顺序相反组成。
虽然 P 和 P' 看起来完全一样,面积也相同,但它们的顶点排列方向不同:
- 如果 P 是顺时针排列的,则 P' 是逆时针的,反之亦然
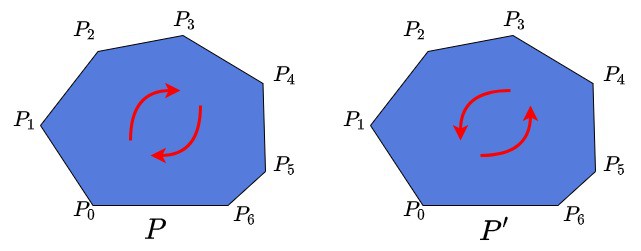
这一点将在我们判断方向时起到关键作用。此外,正如前面所说:P 和 P' 的面积数值相同,但符号相反。
3. 面积计算
有一个线性时间复杂度的算法用于计算 2D 多边形的面积。我们将简要介绍其核心公式,并在判断顶点顺序时使用该公式。
多边形的面积可以是正数也可以是负数,具体取决于顶点排列方向。
3.1. 三角形面积
设三角形 $ T_{ABC} $ 由三点 $ A(x_1, y_1), B(x_2, y_2), C(x_3, y_3) $ 构成:
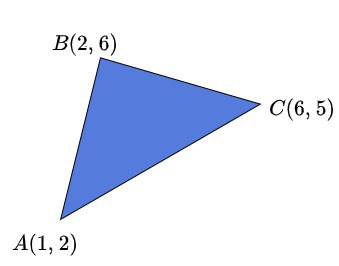
其面积计算公式为:
$$ S_T = \frac{1}{2} \begin{vmatrix} x_2 - x_1 & x_3 - x_1 \ y_2 - y_1 & y_3 - y_1 \end{vmatrix} = \frac{1}{2}[(x_2 - x_1)(y_3 - y_1) - (x_3 - x_1)(y_2 - y_1)] $$
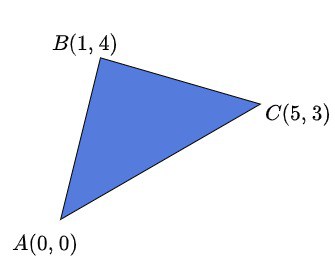
若将点 A 移动到原点 $ (0, 0) $,则公式简化为:
$$ S_T = \frac{1}{2}(x_2 y_3 - x_3 y_2) $$
3.2. 多边形面积
我们可以通过将多边形分解为多个三角形来计算其面积。通常我们选择原点 $ Z(0, 0) $ 作为辅助点,将每个相邻顶点对与原点构成一个三角形,然后将所有三角形面积相加。
设多边形顶点为 $ P_0, P_1, ..., P_{n-1} $,则其面积公式为:
$$ S_{polygon} = \frac{1}{2} \sum_{i=0}^{n-1} (x_i y_{i+1} - y_i x_{i+1}) $$
其中 $ P_n = P_0 $,即最后一个点与第一个点相连。
⚠️ 注意:该公式计算出的面积可能是正也可能是负,取决于顶点排列顺序。
4. 算法实现
我们使用 Signum 函数 来判断面积的符号:
- 若 $ S_{polygon} > 0 $:顶点为逆时针顺序 ✅
- 若 $ S_{polygon} < 0 $:顶点为顺时针顺序 ❌
- 若 $ S_{polygon} = 0 $:说明多边形退化为一条线或点(可能是数据错误)
✅ 算法步骤:
- 使用上述公式计算多边形面积 $ S_{polygon} $
- 使用
Math.signum()获取面积符号 $ \omega $ - 根据符号判断方向
Java 示例代码:
public class PolygonOrientation {
public static boolean isClockwise(List<Point> points) {
double area = calculateArea(points);
return Math.signum(area) < 0;
}
private static double calculateArea(List<Point> points) {
int n = points.size();
double area = 0.0;
for (int i = 0; i < n; i++) {
int j = (i + 1) % n;
Point p1 = points.get(i);
Point p2 = points.get(j);
area += p1.x * p2.y - p2.x * p1.y;
}
return area / 2.0;
}
public static void main(String[] args) {
List<Point> polygon = Arrays.asList(
new Point(0, 0),
new Point(1, 0),
new Point(1, 1),
new Point(0, 1)
);
boolean clockwise = isClockwise(polygon);
System.out.println("Is polygon clockwise? " + clockwise);
}
static class Point {
int x, y;
Point(int x, int y) {
this.x = x;
this.y = y;
}
}
}
5. 时间与空间复杂度分析
✅ 时间复杂度
- 遍历所有顶点计算面积:O(n)
- 判断面积符号:O(1)
最终时间复杂度为:O(n)
✅ 空间复杂度
- 仅需一个变量存储面积值:O(1)
6. 总结
我们介绍了一种线性时间复杂度的算法,用于判断多边形顶点的排列方向。核心思想是通过计算多边形面积的符号来判断方向。
虽然还有其他方法可以实现此功能,但大多数都基于面积计算这一基础思想。掌握这个算法后,你可以轻松应用在图形学、GIS、游戏开发等多个领域中。