1. 概述
操作系统是一组程序的集合,负责执行操作并管理所有资源。
在本文中,我们将介绍五种常见的操作系统类型:批处理操作系统、分布式操作系统、分时操作系统、网络操作系统和实时操作系统。
同时,我们也会对比它们之间的核心差异,帮助你更好地理解它们的适用场景与优缺点。
2. 批处理操作系统(Batch Operating System)
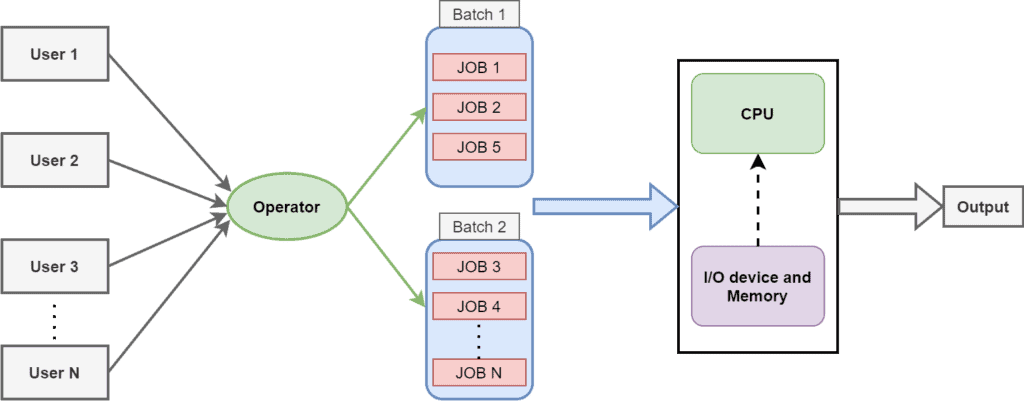
在批处理系统中,用户将任务交给操作员,操作员将相似资源需求的任务归为一组,我们称之为“批”(Batch)。
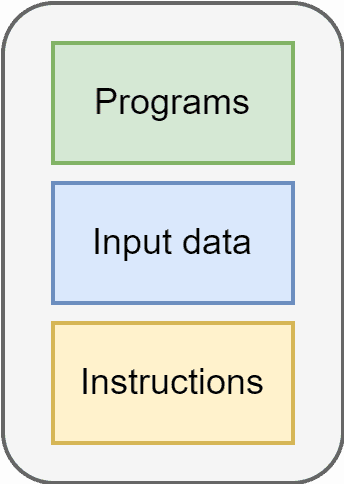
每一批任务包含程序、输入数据和指令:
任务按顺序执行,前一个任务完成后才会开始下一个。因此,批处理系统不涉及任务切换(context switch),属于非抢占式(non-preemptive)的执行方式。
它是一种非交互式操作系统。用户无法在运行时输入信息,必须在任务开始前写好全部程序、数据和指令。
早期的批处理系统使用打孔卡片(punch cards)提交任务,操作员按任务类型分类,形成批处理,再插入计算机执行。现代系统多采用磁带(magnetic tapes)代替打孔卡片:
优缺点
✅优点:
- 任务自动执行,减少人工干预
❌缺点:
- 用户无法交互,缺乏灵活性
- 可能出现任务“饥饿”(starvation),长时间任务影响后续任务执行
- CPU利用率低(人机速度差异大)
3. 分布式操作系统(Distributed Operating System)
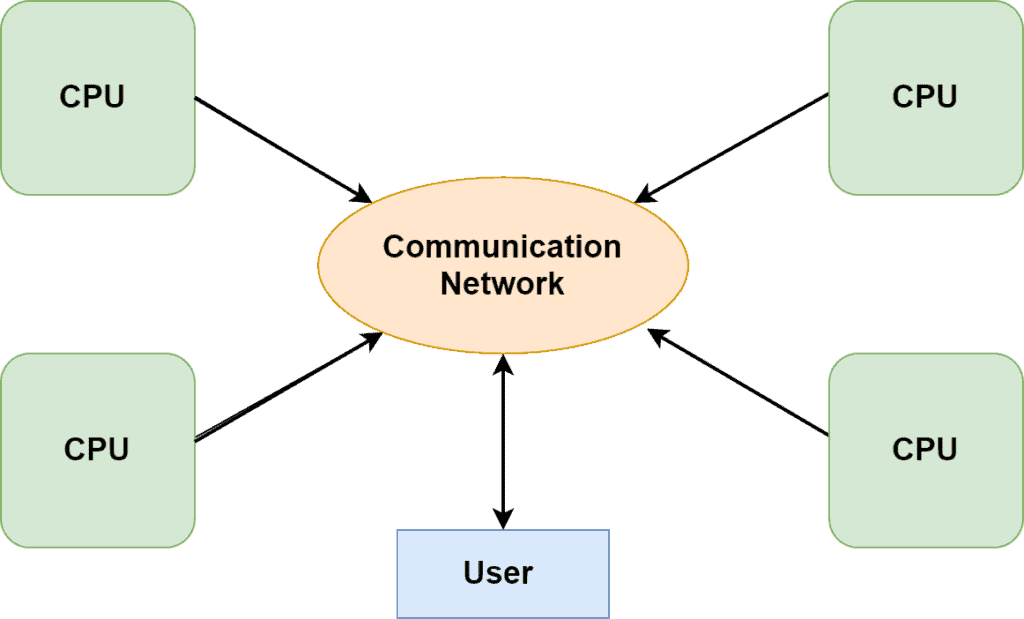
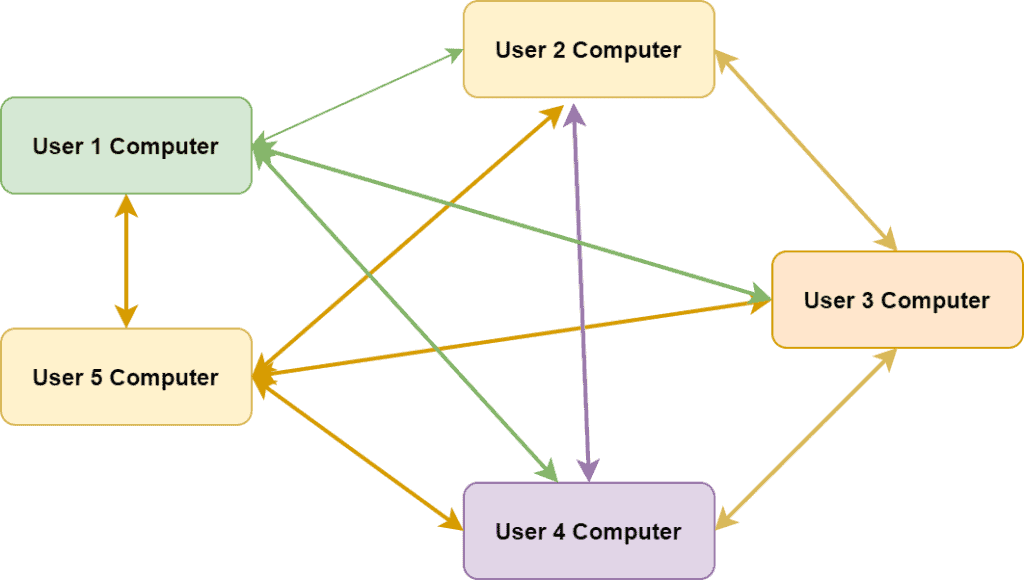
分布式操作系统由多个通过高速总线连接的计算机组成,共享资源,可以并行执行多个任务。也称为松耦合系统(loosely coupled system):
常见的分布式系统架构包括:客户端-服务器、中间件、三层架构、对等网络(peer-to-peer)等。
组成部分
- 工作站
- 数据库服务器
- 计算节点
- 网络
- 终端
- 文件服务器
应用场景
- 通信网络
- 并行计算
- 实时过程控制
- 网络操作
优点
✅优点:
- 可扩展性强,提升整体处理能力
- 支持资源共享,降低单一系统的负载
- 避免单点故障,提高系统容错性
⚠️注意:
- 同步(synchronization)和并发(concurrency)管理复杂
- 网络延迟(network latency)可能影响系统一致性
4. 网络操作系统(Network Operating System)
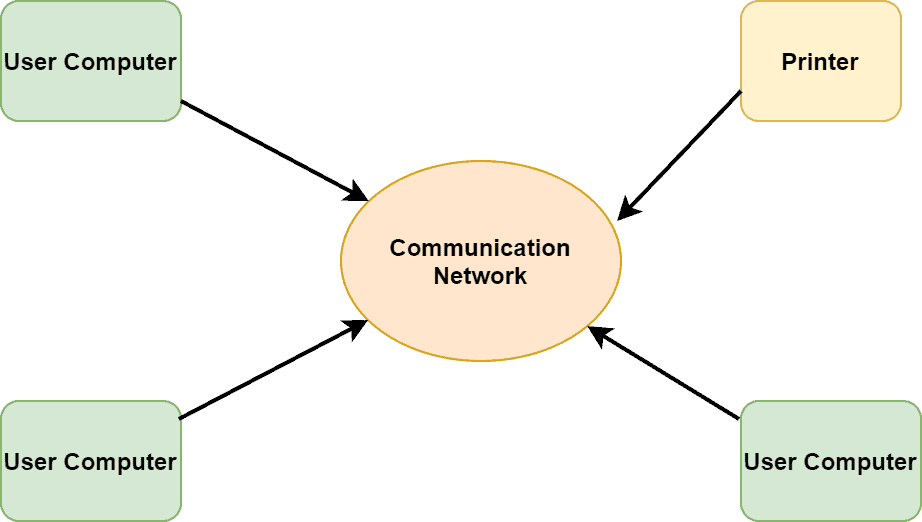
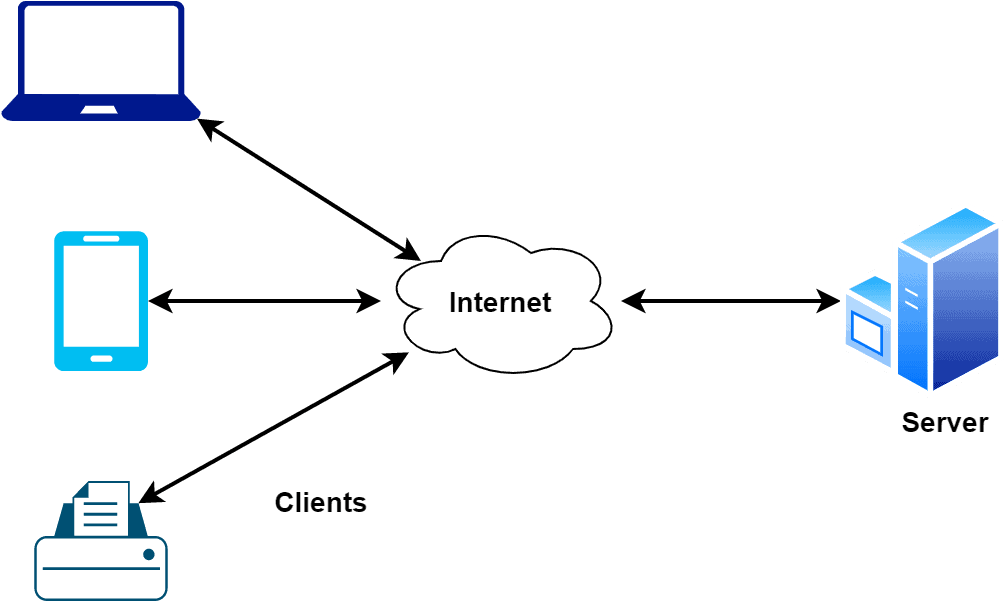
网络操作系统(NOS)通过网络连接多台计算机,共享资源,通常用于路由器、交换机或防火墙等网络设备:
两种常见架构
对等网络(Peer-to-Peer):所有设备共享资源,权限对等:
客户端-服务器(Client-Server):通过中心服务器统一管理和分配资源:
优点
✅优点:
- 易于扩展,支持新设备接入
- 安全性高,支持用户登录、硬件认证、数据访问控制
- 每台设备独立运行,具备自主性
❌缺点:
- 依赖服务器,部署和维护成本高
- 依赖中心节点,存在单点故障风险
5. 分时操作系统(Time-sharing Operating System)
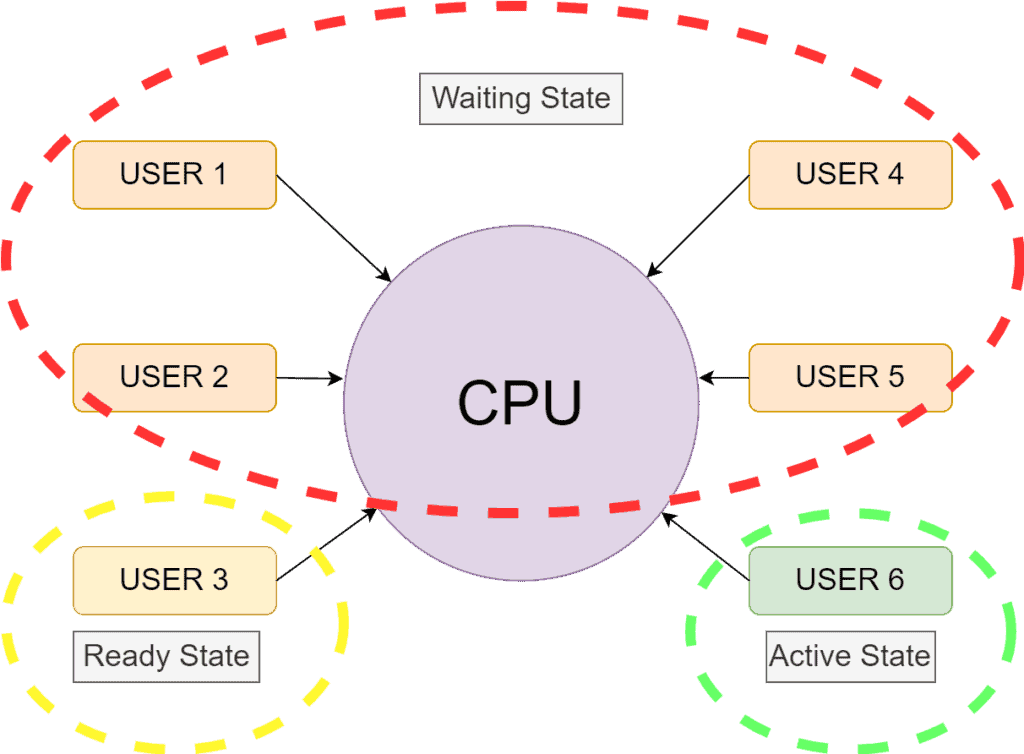
分时系统是多任务批处理系统的进阶版,允许多个用户共享处理器时间。每个用户获得一个时间片(time slice 或 quantum)来执行任务,时间片结束后切换到下一个用户。
工作机制
- 快速切换任务,让用户感觉多个任务在“同时”运行
- 需要良好的内存管理以支持任务快速切换
- 用户状态包括:运行(running)、就绪(ready)、等待(waiting)
优点
✅优点:
- 减少响应时间
- 降低CPU空闲时间
- 支持用户与系统直接交互
❌缺点:
- 高速数据通信需求高
- 存在安全风险
6. 实时操作系统(Real-Time Operating System)
实时操作系统(RTOS)用于对响应时间有严格要求的场景,如嵌入式系统。它没有图形界面,强调快速响应外部事件。
特点
- 高任务切换能力,用户感觉任务“同时”运行
- 轻量级系统,响应速度快
- 根据时间限制严格程度分为三类:
| 类型 | 描述 |
|---|---|
| 硬实时(Hard RTOS) | 严格满足时间限制,否则系统失效 |
| 软实时(Soft RTOS) | 可容忍一定延迟,不影响系统整体功能 |
| 固实时(Firm RTOS) | 介于硬实时与软实时之间,延迟影响质量 |
典型应用场景
- 工业控制
- 医疗设备
- 汽车电子
- 航空航天
示例系统
- MTS(Michigan Terminal System)
- Lynx(LynxOS)
- QNX
优点
✅优点:
- 响应快、确定性强
- 系统稳定、错误率低
- 高效利用连接设备
❌缺点:
- 成本高
- 实现复杂
- 任务切换有限
7. 各类操作系统的对比
批处理 vs 分时系统
| 特性 | 批处理系统 | 分时系统 |
|---|---|---|
| 资源分配 | 任务完成后释放资源 | 按时间片分配资源 |
| 用户干预 | 不允许 | 允许 |
| 饥饿问题 | 可能存在 | 不会存在 |
| 用户友好度 | 低 | 高 |
网络操作系统 vs 分布式操作系统
| 特性 | 网络操作系统(NOS) | 分布式操作系统(DOS) |
|---|---|---|
| 资源共享 | 多台计算机通过网络共享资源 | 多台计算机通过总线协作,像一个系统 |
| 操作系统一致性 | 各设备可运行不同系统 | 所有设备需运行相同系统 |
| 安装难度 | 简单、经济 | 复杂、昂贵 |
| 安全性 | 支持凭证共享与资源管理 | 更注重任务协作 |
| 可靠性 | 依赖中心服务器,可靠性较低 | 无中心节点,可靠性高 |
8. 总结
本文介绍了五种主流操作系统类型:
- 批处理系统:适合任务顺序执行,但交互性差
- 分布式系统:资源共享、高可用性,但管理复杂
- 网络系统:常用于网络设备,安全性高但依赖服务器
- 分时系统:支持多用户交互,响应快
- 实时系统:适用于嵌入式和控制系统,响应快、确定性强
根据实际需求选择合适的操作系统,才能更好地发挥系统性能并满足业务目标。