1. 简介
在图像处理领域,"能量(Energy)"是一个常见术语。虽然它在图像处理、信号处理和物理学中都有定义,但它们之间是紧密相关的。本文将重点讲解“图像处理”中能量的含义,并在最后简要对比其他两个领域中的定义。
如果你是图像处理方向的开发者或工程师,理解“能量”对于图像压缩、边缘检测、特征提取等任务至关重要。简单来说,图像中的“高能量”区域意味着存在显著的局部变化,这些区域往往包含关键信息。
2. 定义与理解
图像本质上是一个二维矩阵,每个像素值代表该点的灰度值(0 表示黑色,255 表示白色)。“能量”描述的是图像中某个区域内的局部变化程度。变化越剧烈,能量越高。
例如,下图是一张人脸图像:

我们可以看到脸部与头发之间存在明显的亮度变化,这种变化就是图像中的“边缘”(Edge),也是高能量区域的体现:

那么,如何让程序自动识别这些边缘呢?这就涉及到图像处理中两个关键技术:傅里叶变换(Fourier Transform) 和 卷积(Convolution)。
3. 傅里叶变换
傅里叶变换是一种将图像从空间域转换到频率域的方法。它可以帮助我们分析图像中不同频率成分的分布,从而识别出高频(变化剧烈)和低频(平缓)区域。
3.1 一维傅里叶变换
我们先看图像中一行像素的强度变化:

红色区域是我们关注的边缘部分。将其提取出来后,可以得到如下强度值:
[174 188 156 108 105 104 105 102 96 87 90 73 53 29 22 30 37 39 32 44 43 42 40]
将这些值绘制成图:
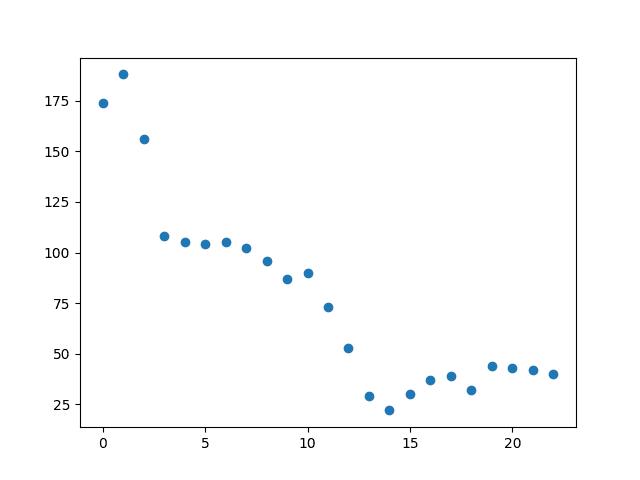
然后我们对该序列进行离散傅里叶变换(DFT),得到其频域图:

图中右侧黄色区域表示高频成分,意味着该区域存在明显的边缘。如果我们想提取边缘,只需滤除低频成分即可。
3.2 二维傅里叶变换
将上述思路扩展到整张图像:
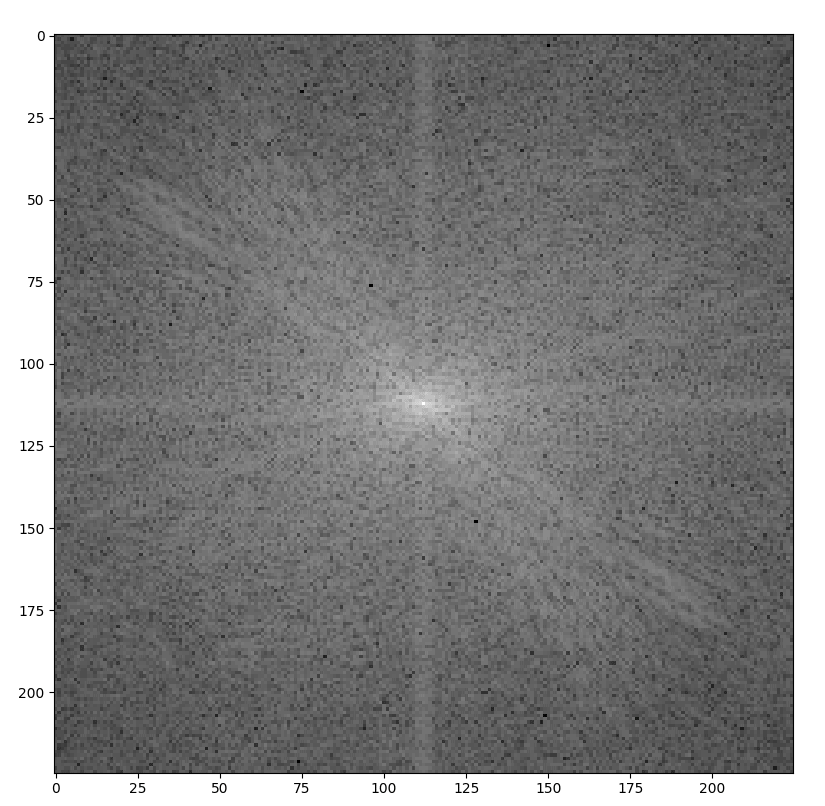
中心区域为低频,向外频率逐渐升高。如果我们去除中心的低频部分:
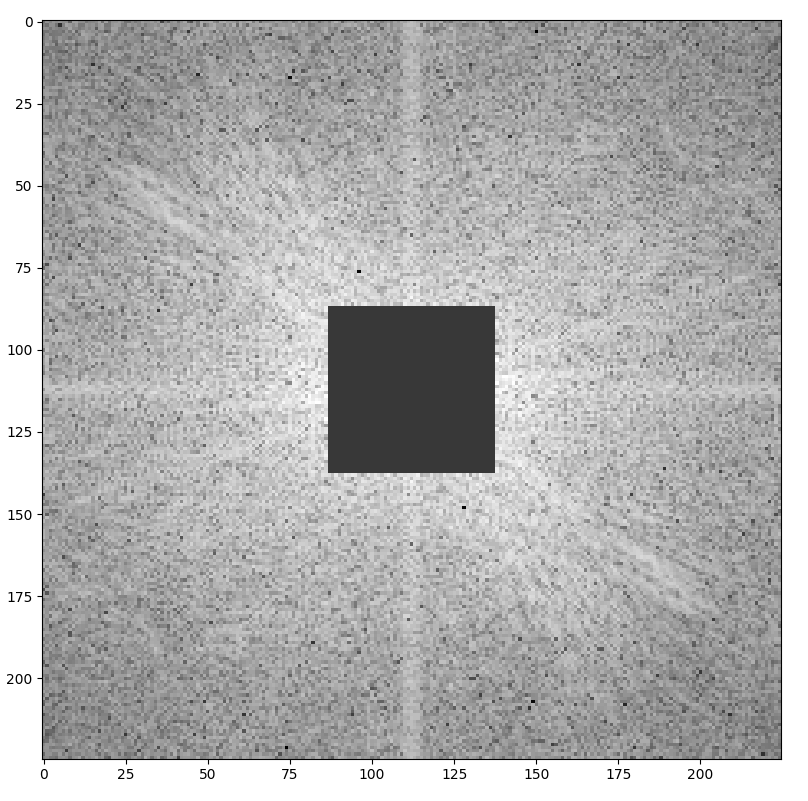
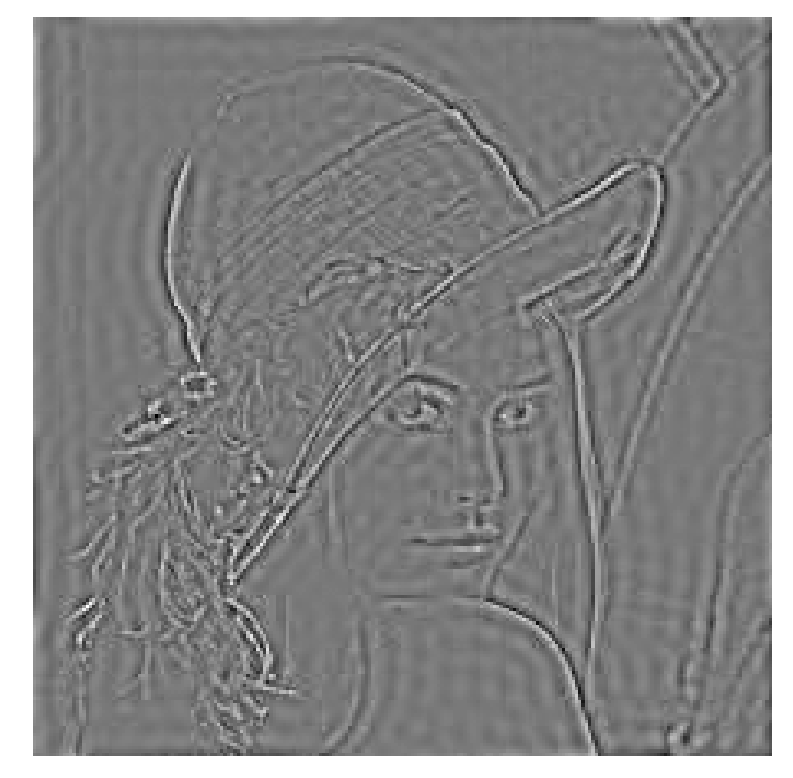
再进行逆变换,就能得到只保留边缘的图像:
✅ 结论:傅里叶变换能有效提取图像中的高频能量区域,适合用于边缘检测和图像分析。
4. 卷积操作
另一种检测边缘的方法是使用卷积,适用于彩色图像,也更灵活。
4.1 原理
卷积通过一个  的滤波核对图像进行滑动加权平均:
的滤波核对图像进行滑动加权平均:
$$ g(x,y) = \omega * f(x,y) = \sum_{w=-a}^{a} \sum_{z=-b}^{b} \omega(w, z) f(x-w, y-z) $$
其中:
- $ f $:原始图像
- $ g $:输出图像
- $ \omega $:卷积核(滤波器)
例如,使用高斯模糊核对图像进行平滑处理后:
再将原图与模糊图相减,即可得到边缘图像:
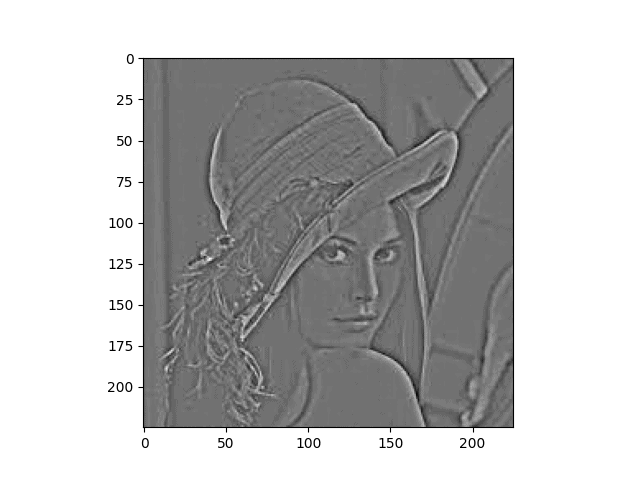
✅ 优点:卷积操作灵活,可自定义滤波核来提取不同方向或类型的边缘信息。
5. 与其他“能量”概念的对比
图像处理中的“能量”与信号处理和物理学中的定义有所不同,但又密切相关。
5.1 信号处理中的能量定义
信号 $ x(t) $ 的能量定义为:
$$ E_s = \int_{-\infty}^{\infty} |x(t)|^2 dt $$
离散情况下为:
$$ E_s = \sum_{n=-\infty}^{\infty} |x(n)|^2 $$
如果直接套用到图像上,就是将所有像素值平方求和。但这样定义的问题在于:纯白图像能量最大,纯黑图像为零,这在图像处理中并无实际意义。
5.2 物理学中的能量定义
物理学中能量通常表示为:
$$ E = \frac{E_s}{Z} = \frac{1}{Z} \int_{-\infty}^{\infty} |x(t)|^2 dt $$
这里除以一个归一化因子 $ Z $,表示信号的幅值。
⚠️ 注意:图像处理中的“能量”并不是简单地将像素值平方求和,而是指图像中局部变化的程度。
6. 总结
图像处理中的“能量”并不是物理意义上的能量,而是指图像中局部变化的强度。这种变化往往对应于边缘、纹理等重要视觉信息。
我们可以通过以下两种方式提取图像中的能量信息:
- ✅ 傅里叶变换:将图像转换到频率域,提取高频成分,识别边缘
- ✅ 卷积操作:使用滤波核对图像进行处理,灵活提取各种边缘特征
理解“能量”的本质有助于我们更好地进行图像压缩、边缘检测、图像增强等任务。对于图像处理工程师来说,这是一个基础但非常核心的概念。