1. 概述
在本文中,我们将探讨计算机科学中最重要的数据结构之一——图(Graph)。
我们会先介绍图论的基础知识,帮助你建立概念层面的理解。随后,我们会讨论图在机器学习应用中常见的不同类型。文章最后,你将了解什么是图、图的种类,以及图的基本组成元素的特性。
2. 图论基础
2.1 图的定义
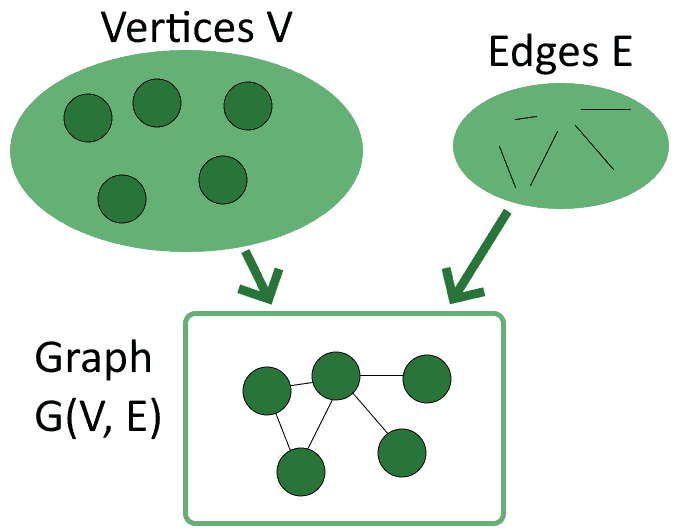
图是由顶点(Vertex)集合和边(Edge)集合构成的一种结构。要构成一个图,必须定义两个集合:顶点和边。
- ✅ 顶点是图存在的基本单元。虽然通常认为图必须至少包含一个顶点,但这更多是惯例而非理论要求。顶点代表通过某种关系相互关联的对象。
- ❌ 边是可选的。图可以没有边,这种图被称为空图(Empty Graph)。边表示两个顶点之间的联系,也可以是顶点到自身的连接(称为自环 Loop)。
我们通常用  表示顶点集合,用
表示顶点集合,用  表示边集合。一个图
表示边集合。一个图  可以表示为
可以表示为  ,表示顶点和边之间的关系。
,表示顶点和边之间的关系。
注意:括号中两个集合的顺序是有意义的,通常是先顶点后边。比如 和  是不同的结构。
是不同的结构。
2.2 顶点的基本属性
图必须包含顶点,但边是可选的。顶点可以不连接任何边,这种顶点称为孤立顶点(Isolated Vertex):
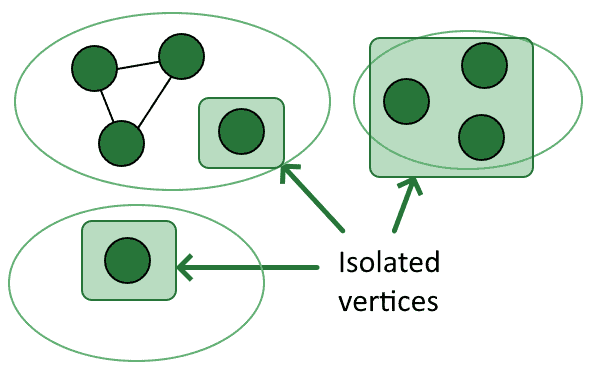
孤立顶点的度数(Degree)为 0,记作  。度数表示一个顶点连接的边的数量。
。度数表示一个顶点连接的边的数量。
如果顶点不是孤立的,那么它的度数至少为 1。特别地,度数为 1 的顶点称为“叶子(Leaf)”,这个术语也常见于树结构中。
2.3 顶点标签
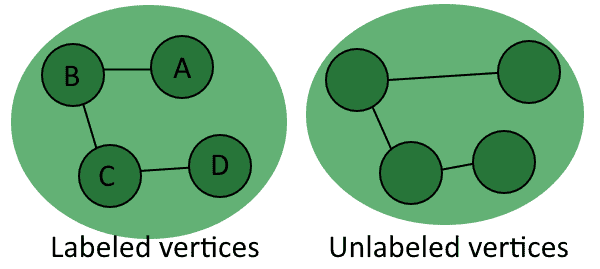
顶点可以带标签(Labeled Vertex),也可以不带(Unlabeled Vertex):
- ✅ 带标签的顶点可以携带任意类型的数据,用于区分不同顶点。
- ❌ 无标签顶点只能通过其连接关系来区分。
此外,图中顶点的数量  被称为图的阶数(Order)。
被称为图的阶数(Order)。
2.4 边的基本属性
边不能独立存在,它总是依附于图和顶点。每条边必须连接两个顶点,这两个顶点称为该边的端点(Endpoints)。
⚠️ 有些图允许边连接多个顶点,这种结构称为超图(Hypergraph),但本文不讨论。
2.5 边的方向与自环
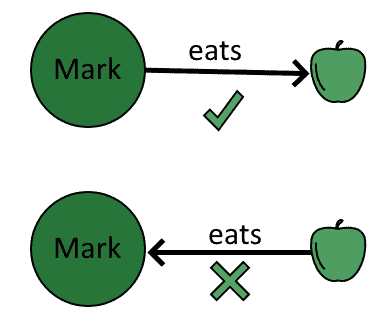
边可以分为有向边(Directed Edge)和无向边(Undirected Edge):
- ✅ 有向边从一个顶点指向另一个顶点,例如
 表示从 A 到 B 的边。
表示从 A 到 B 的边。 - ❌ 无向边双向连接两个顶点,相当于同时存在 和
 。
。
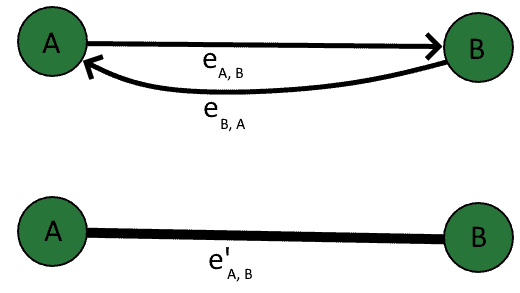
此外,如果一条边的起点和终点是同一个顶点,这种边称为自环(Loop)。不含自环的图称为简单图(Simple Graph)。
2.6 图中的路径
图中的路径是由一系列边组成的连接两个顶点的序列。路径可以是:
- ✅ 有向路径(Directed Path):由有向边构成。
- ✅ 无向路径(Undirected Path):由无向边构成。
想象图是一个迷宫,每个顶点是交叉点,路径就是从入口到出口的路线。
一个特殊的路径是哈密尔顿路径(Hamiltonian Path),它遍历图中所有顶点一次且仅一次:
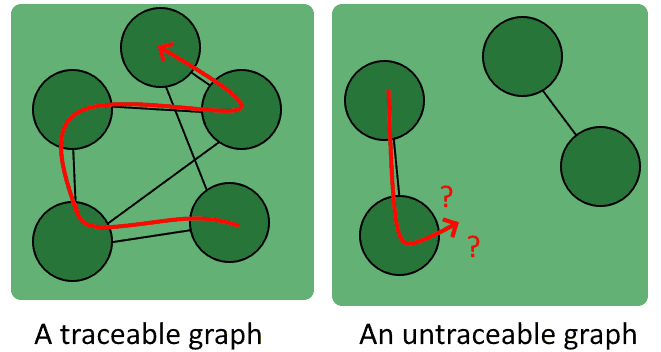
如果路径的起点和终点相同,则称为环(Cycle)。检测环的存在非常重要,因为路径查找算法可能会陷入无限循环。
路径在计算机科学中非常关键,因为它与最短路径算法(如 Dijkstra 和 A*)密切相关,这些算法广泛应用于流程优化、物流和搜索引擎等领域。
3. 图的类型
3.1 空图
空图是指没有边的图,只有顶点。例如:
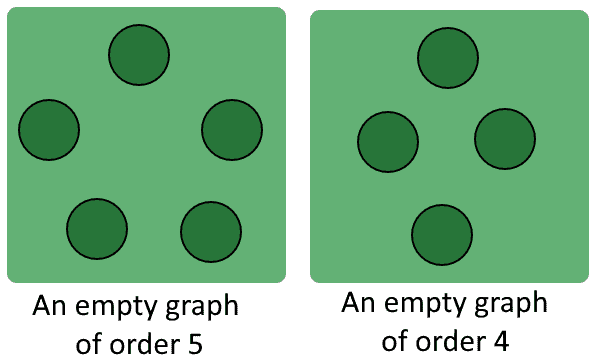
空图的大小(即边的数量)为 0。
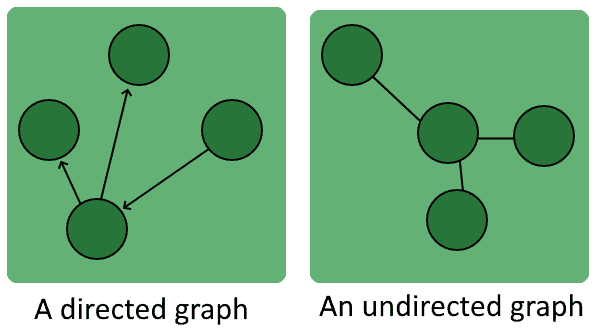
3.2 有向图(Directed Graph)
有向图中的边具有方向性,例如 但没有 。
有向图非常适合建模不可逆关系,例如“用户关注某人”或“网页链接”。
3.3 无向图(Undirected Graph)
无向图中,如果存在 ,则一定也存在 。
无向图允许任意两个顶点之间自由往返。
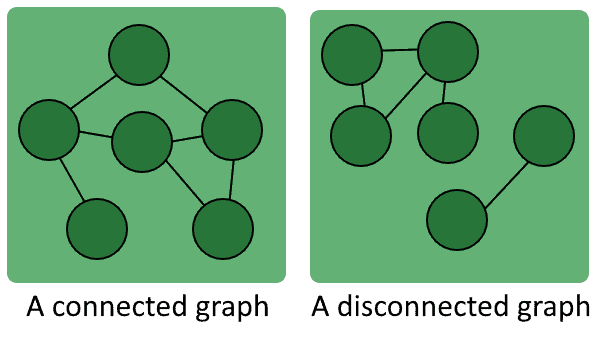
3.4 连通图与非连通图
- ✅ 连通图(Connected Graph):任意两个顶点之间都存在路径。
- ❌ 非连通图(Disconnected Graph):存在至少两个顶点之间没有路径。
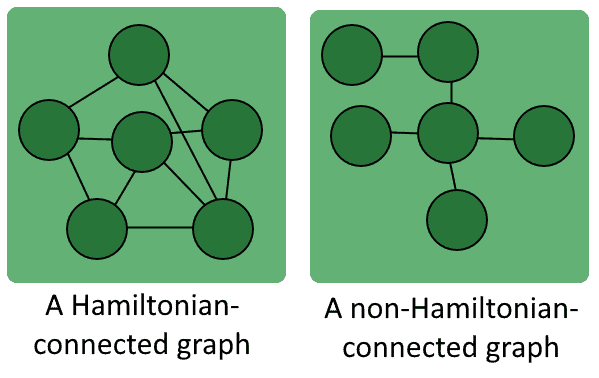
3.5 哈密尔顿连通图(Hamiltonian-Connected Graph)
这种图中任意两个顶点之间都存在哈密尔顿路径。它一定是可追踪图(Traceable Graph),但反过来不一定成立。
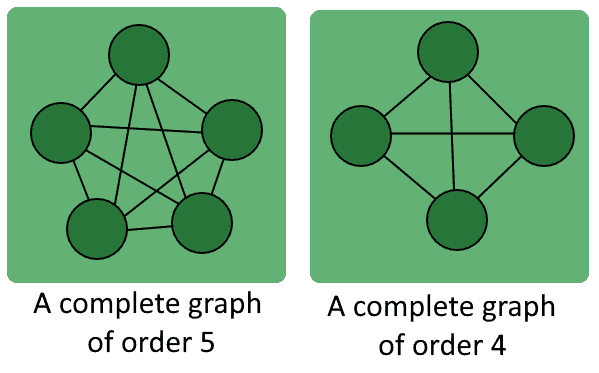
3.6 完全图(Complete Graph)
完全图中任意两个顶点之间都有边相连。对于阶数为 的完全图,边的数量为:
$$ |E| = \frac{|V| \cdot (|V| - 1)}{2} $$
3.7 锦标赛图(Tournament)
锦标赛图是一种完全有向图,即任意两个顶点之间只有一条方向明确的边。
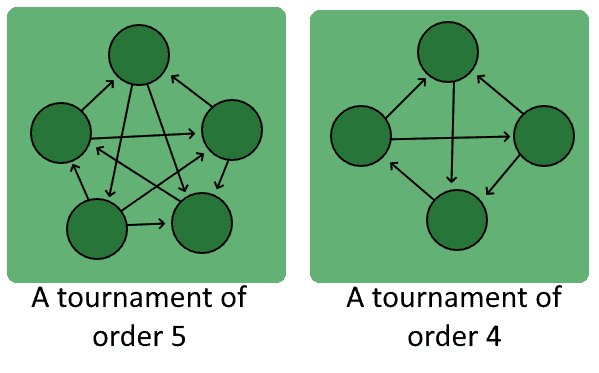
这种图常用于模拟比赛结构,比如体育赛事中队伍之间的胜负关系。
3.8 加权图(Weighted Graph)
加权图的边带有数值权重,表示某种度量(如距离、成本、时间等)。
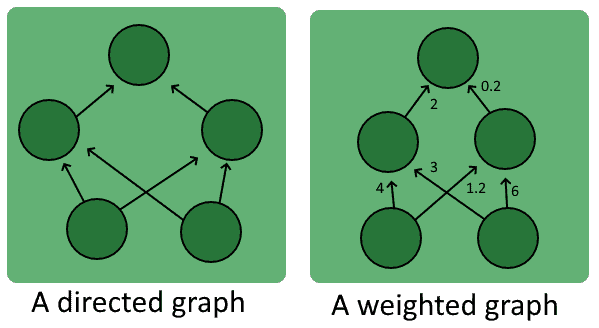
一个典型的加权图是人工神经网络(Artificial Neural Network),其中每个边代表连接权重,每个顶点代表神经元及其激活函数。
4. 总结
本文我们介绍了图论的基本概念,包括图、顶点、边、路径等,并详细讨论了图的多种类型及其特性:
- ✅ 图由顶点和边构成
- ✅ 顶点可以带标签或不带标签
- ✅ 边可以是有向或无向,也可以是自环
- ✅ 图可以是连通、非连通、完全、有向、无向、加权等类型
理解这些基础概念,有助于在机器学习、网络分析、路径查找等场景中更有效地使用图结构。