1. 概述
在本教程中,我们将探讨如何从一组给定的二维点中找出距离最远的点对,并计算其欧几里得距离。
我们会先定义问题并举例说明,接着介绍两种不同的解法:
- 暴力解法:遍历所有点对,计算它们之间的距离,找出最大值。时间复杂度为 O(N²)。
- 旋转卡壳法(Rotate Calipers):利用凸包(Convex Hull)和凸多边形直径(Diameter)的性质,将问题优化到 O(N log N) 的时间复杂度。
2. 问题定义
给定一组二维平面上的点,我们要找出其中距离最远的一对点。点对之间的距离定义为欧几里得距离:
$$ \text{distance}(P, Q) = \sqrt{(P.x - Q.x)^2 + (P.y - Q.y)^2} $$
示例
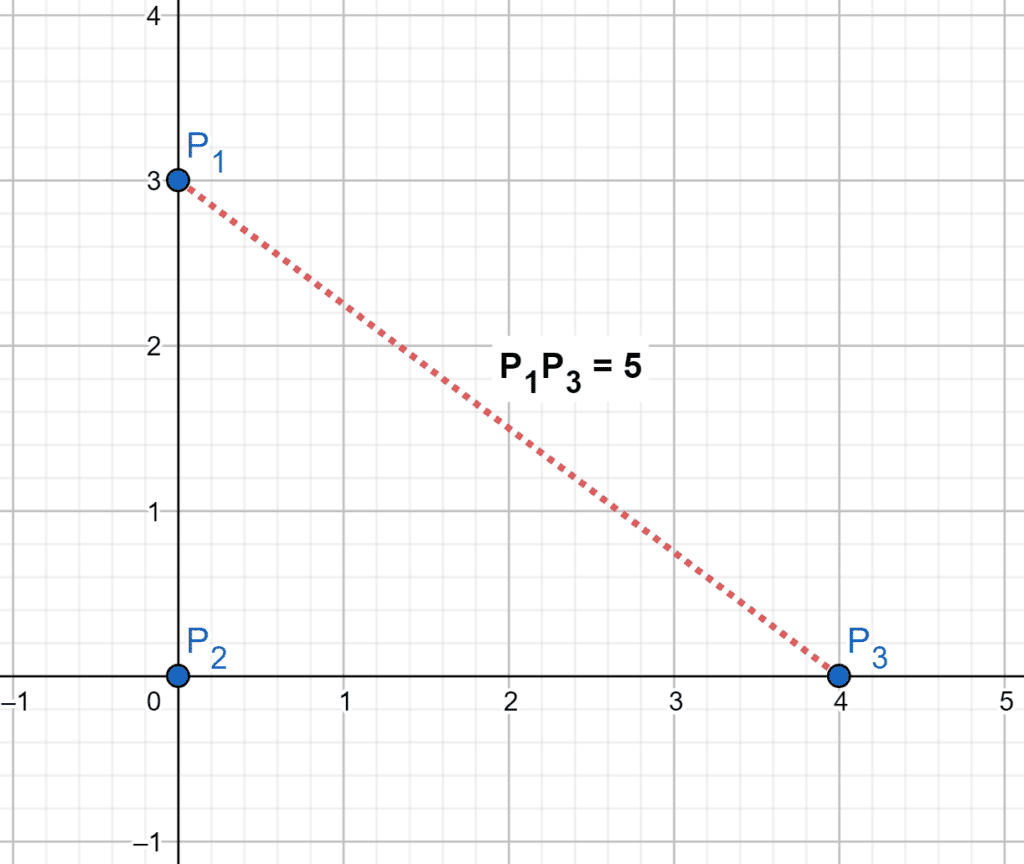
假设我们有如下三个点:
- $ P_1(0, 3) $
- $ P_2(0, 0) $
- $ P_3(4, 0) $
它们构成的点对有三种组合:
- $ P_1 - P_2 $ 距离为 3
- $ P_1 - P_3 $ 距离为 5 ✅
- $ P_2 - P_3 $ 距离为 4
因此,最大距离为 5,对应点对 $ P_1 $ 和 $ P_3 $。
3. 暴力解法
3.1 核心思想
遍历所有点对,计算它们之间的距离,并记录最大值。
3.2 算法实现(Java)
public double maxDistanceBruteForce(List<Point> points) {
double maxDist = 0;
int n = points.size();
for (int i = 0; i < n; i++) {
for (int j = i + 1; j < n; j++) {
double dist = distance(points.get(i), points.get(j));
maxDist = Math.max(maxDist, dist);
}
}
return maxDist;
}
private double distance(Point a, Point b) {
return Math.sqrt(Math.pow(a.x - b.x, 2) + Math.pow(a.y - b.y, 2));
}
3.3 时间复杂度
- 时间复杂度:O(N²)
- 空间复杂度:O(1)
适用于点数较少的场景。当 N 较大时,性能下降明显,不推荐使用。
4. 旋转卡壳法(Rotate Calipers)
4.1 核心思想
最远点对一定出现在凸包的顶点上,并且其距离等于该凸多边形的直径(Diameter)。
该方法分为两个阶段:
- 构建凸包(Convex Hull)
- 使用旋转卡壳法(Rotate Calipers)找出凸包上的最远点对
4.2 构建凸包(Graham Scan 实现)
public List<Point> convexHull(List<Point> points) {
if (points.size() < 3) return points;
// 找出最左下角的点作为起点
Point start = Collections.min(points, (a, b) -> {
if (a.x != b.x) return Integer.compare(a.x, b.x);
return Integer.compare(a.y, b.y);
});
// 按极角排序
List<Point> sorted = new ArrayList<>(points);
sorted.remove(start);
sorted.sort((a, b) -> {
int orientation = orientation(start, a, b);
if (orientation == 0) {
return Double.compare(start.distanceTo(a), start.distanceTo(b));
}
return orientation < 0 ? -1 : 1;
});
List<Point> hull = new ArrayList<>();
hull.add(start);
for (Point p : sorted) {
while (hull.size() >= 2 &&
orientation(hull.get(hull.size() - 2), hull.get(hull.size() - 1), p) <= 0) {
hull.remove(hull.size() - 1);
}
hull.add(p);
}
return hull;
}
private int orientation(Point o, Point a, Point b) {
double cross = (a.x - o.x) * (b.y - o.y) - (a.y - o.y) * (b.x - o.x);
if (cross < 0) return -1;
else if (cross > 0) return 1;
else return 0;
}
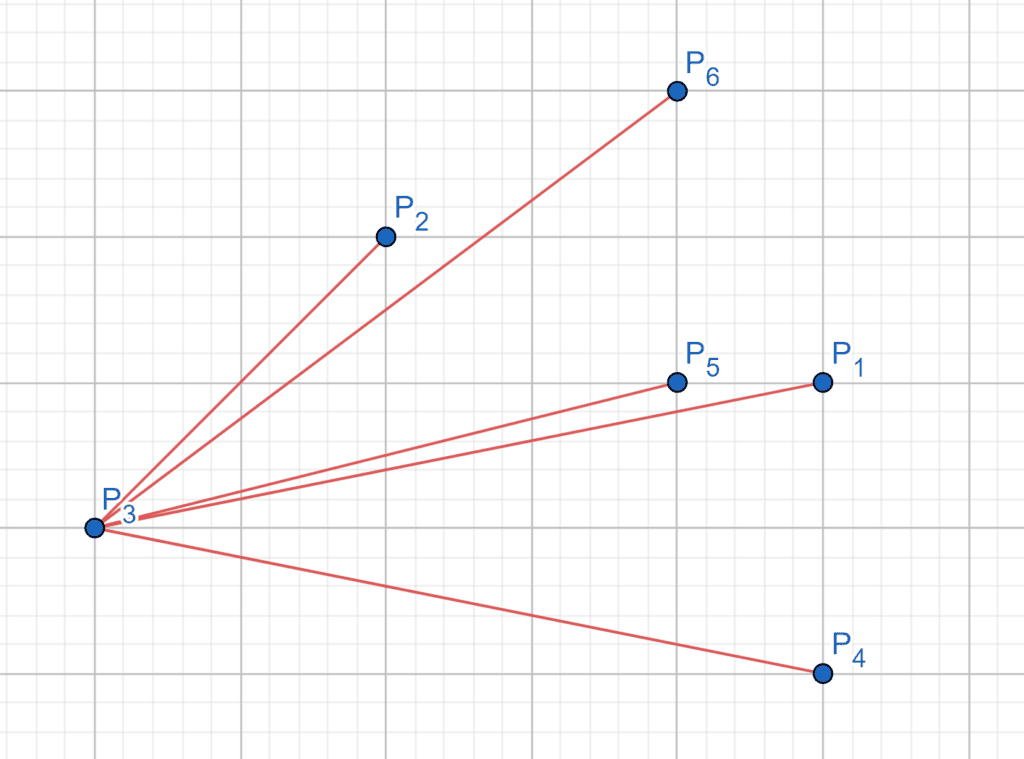
示例图
4.3 计算凸多边形直径(Rotate Calipers)
public double rotateCalipers(List<Point> hull) {
int n = hull.size();
if (n == 2) return hull.get(0).distanceTo(hull.get(1));
int q = 1;
double maxDist = 0;
for (int p = 0; p < n; p++) {
while (area(hull.get(p), hull.get((p + 1) % n), hull.get((q + 1) % n)) >
area(hull.get(p), hull.get((p + 1) % n), hull.get(q))) {
q = (q + 1) % n;
}
double dist = hull.get(p).distanceTo(hull.get(q));
maxDist = Math.max(maxDist, dist);
}
return maxDist;
}
private double area(Point a, Point b, Point c) {
return (b.x - a.x) * (c.y - a.y) - (b.y - a.y) * (c.x - a.x);
}
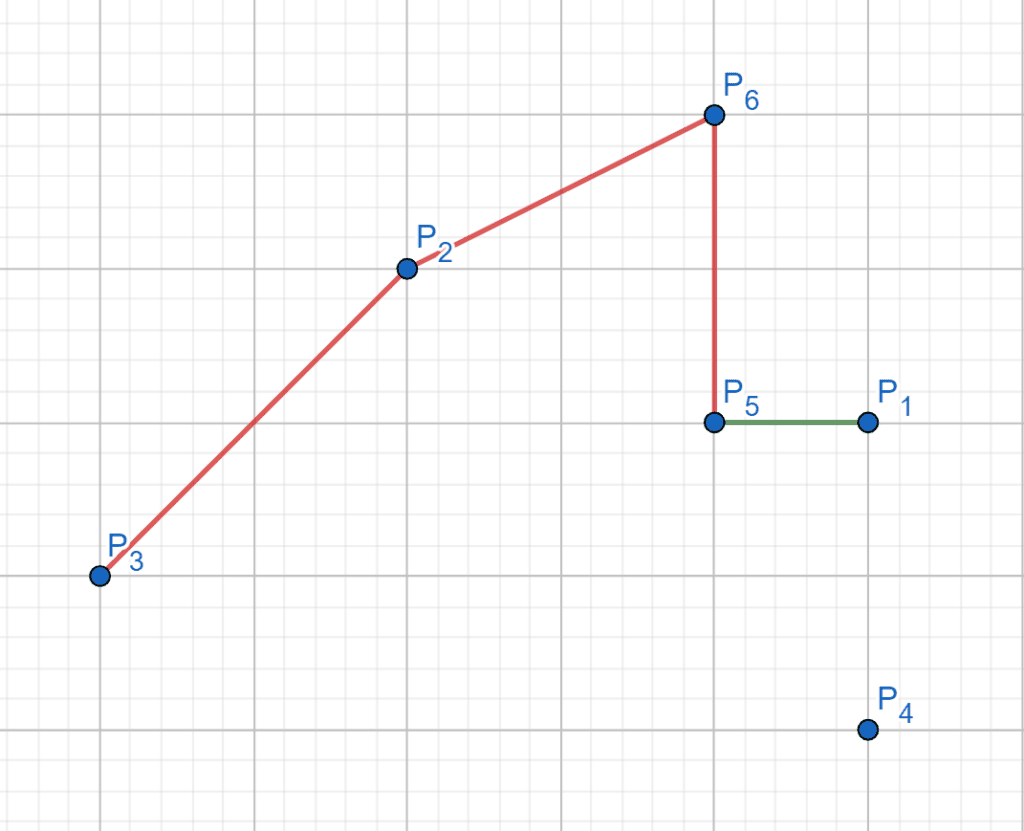
示例图
4.4 时间复杂度分析
- 构建凸包:O(N log N)
- 旋转卡壳计算直径:O(N)
- 总复杂度:O(N log N)
适合大规模数据集,是性能更优的解法。
5. 总结
| 方法 | 时间复杂度 | 适用场景 |
|---|---|---|
| 暴力解法 | O(N²) | 小规模数据 |
| 旋转卡壳法 | O(N log N) | 大规模数据 |
本文我们介绍了如何找出二维平面上最远的点对,以及两种解决方法:
- 暴力解法:简单直接,但效率低。
- 旋转卡壳法:结合凸包与旋转卡壳技巧,效率更高,适合处理大量数据。
在实际应用中,如果点数较多,建议优先使用旋转卡壳法。