1. 概述
旅行商问题(Travelling Salesman Problem, TSP) 是理论计算机科学和运筹学中非常经典的问题。其标准形式属于 NP-Hard 类问题,意味着没有已知的多项式时间内求解方法。
本文将介绍使用 动态规划(Dynamic Programming) 来解决 TSP 的方法,并对算法的时间复杂度进行分析。
2. TSP 简介
TSP 的基本设定是:给定一组城市以及每对城市之间的距离,要求旅行商从一个城市出发,访问每个城市恰好一次,并最终回到起点城市,使得总路径长度最短。
举个例子来说明:
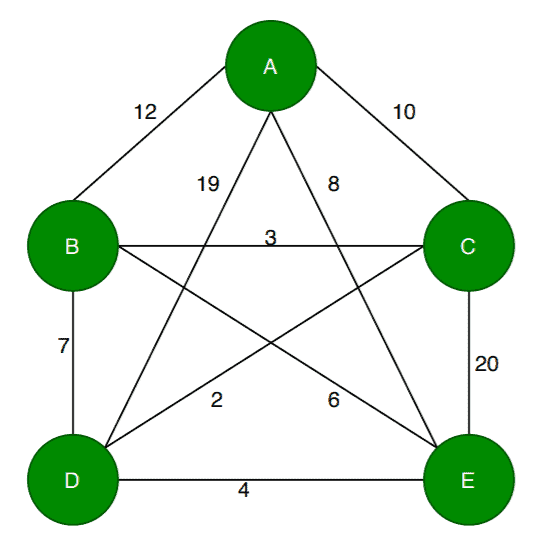
图中节点代表城市,边上的数值表示两个城市之间的距离。假设旅行商从城市 A 出发,他需要访问所有城市一次,并最终返回 A,路径总距离要尽可能短。
在图中仅包含 5 个城市的情况下,问题已经显得相当复杂。因为这是一个完全图,每个城市都可以到达其他所有城市。旅行商必须选择一条路径,不重复访问城市,并使得总距离最小。
那么,如何找到这样的最短路径?我们接下来将介绍一种动态规划解法。
3. 使用动态规划解决 TSP
我们先来看一下 TSP 动态规划算法的伪代码,然后逐步解释其逻辑:
algorithm DynamicApproachForTSP(s, N, dist):
// INPUT
// sp = starting point
// N = a subset of input cities
// dist = function to compute distance among the cities
// OUTPUT
// Cost = the cost of the TSP solution
visited <- data structure to track visited cities
for x in N:
visited[x] <- 0
Cost <- a matrix initialized with zero values
return TSP(N, sp)
function TSP(N, s):
visited[s] <- 1
if |N| = 2 and k != s:
Cost[N, k] <- dist(s, k)
return Cost
else:
for j in N:
for i in N and Visited[i] = 0:
if j != i and j != s:
Cost[N, j] <- min(TSP(N - {i}, j) + dist(j, i))
visited[j] <- 1
return Cost
✅ 算法说明
- 输入包括城市集合
N、起点城市s和距离函数dist - 每个城市都有一个唯一的标识符(如
1, 2, 3, ..., n) - 初始化时,所有城市都未访问,从起点
s开始访问 - 初始路径成本设为 0
- 使用递归函数计算路径成本:
- 如果城市集合大小为 2,直接返回两城市之间的距离作为递归终止条件
- 如果城市数量大于 2,则从当前城市出发,尝试访问下一个未访问城市,并递归计算剩余城市的最短路径
- 最终返回最小路径成本
⚠️ 注意点
- 该算法使用了 动态规划 + 递归 + 状态压缩 的思想,通过缓存子问题结果来避免重复计算
- 每次递归调用都会记录当前城市和已访问的城市集合,从而避免重复计算相同状态
4. 时间复杂度分析
TSP 的动态规划解法中,城市集合的子集数量最多为:
N × 2^N
其中:
2^N表示所有城市子集的数量- 每个子集最多需要
O(N)时间进行处理(尝试从每个城市出发)
因此,该算法的时间复杂度为:
✅ O(N² × 2^N)
虽然这个复杂度仍然很高,但由于指数部分的增长速度远快于多项式,所以该算法适用于 城市数量较小(如 N ≤ 20)的情况。
5. 总结
TSP 是一个经典的 NP-Hard 问题,虽然无法在多项式时间内求解,但通过动态规划方法,我们可以在城市数量不大的情况下,找到最优解或近似最优解。
✅ 本文要点回顾:
| 项目 | 内容 |
|---|---|
| 算法类型 | 动态规划 + 递归 + 状态压缩 |
| 时间复杂度 | O(N² × 2^N) |
| 适用场景 | 城市数量较小(如 N ≤ 20) |
| 优点 | 可求得最优解 |
| 缺点 | 时间复杂度高,不适合大规模问题 |
在实际开发中,如果城市数量较多,可以考虑使用启发式算法(如遗传算法、模拟退火等)来近似求解。但在城市数量可控的情况下,动态规划仍然是一个非常有价值的解法。