1. 概述
本文将介绍两种常见的单源最短路径(SSSP)算法:Dijkstra 算法和Bellman-Ford 算法。我们将从理论原理、适用场景、优缺点等方面进行对比分析,帮助你在不同图结构中选择合适的算法。
2. Dijkstra 算法
2.1 原理简介
Dijkstra 算法是一种用于单源最短路径(SSSP)的经典算法,适用于非负权图。其核心思想是:
- 从起点开始,每次选择当前距离最短的节点,更新其邻居的距离。
- 使用优先队列(如最小堆)来维护待处理节点。
2.2 时间复杂度
- 时间复杂度:
O(V + E log V),其中V是节点数,E是边数。 - 在稠密图中,
E ≈ V²,此时复杂度约为O(V² log V)。
2.3 适用条件
- ✅ 适用于无负权边的图。
- ❌ 无法处理负权边或负权环。
2.4 优势与局限
| 优势 | 局限 |
|---|---|
| ⚡ 时间复杂度低,效率高 | ❌ 不能处理负权边 |
| ✅ 适用于稀疏图 | ❌ 多源最短路径时效率不如 Floyd-Warshall |
3. Bellman-Ford 算法
3.1 原理简介
Bellman-Ford 算法也是一种 SSSP 算法,但其核心思想是动态规划:
- 对图中所有边进行
V - 1轮松弛操作(relaxation)。 - 若第
V轮仍有更新,则说明图中存在负权环。
3.2 时间复杂度
- 时间复杂度:
O(V * E),适用于边数不多的图。 - 对于稠密图,性能不如 Dijkstra 或 Floyd-Warshall。
3.3 适用条件
- ✅ 支持负权边。
- ✅ 可检测负权环。
- ❌ 无法处理无向图中的负权边(会形成负权环)。
3.4 优势与局限
| 优势 | 局限 |
|---|---|
| ✅ 可处理负权边 | ⚠️ 时间复杂度较高 |
| ✅ 可检测负权环 | ❌ 不适用于无向图中的负权边 |
4. 示例:非负权图
考虑如下图:
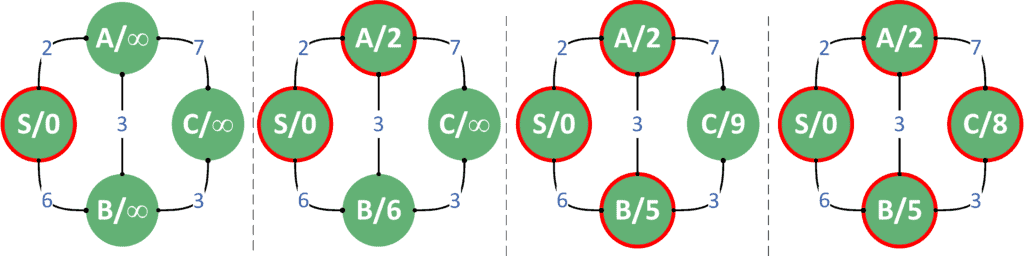
Dijkstra 算法流程:
- 起点
S距离设为 0,加入优先队列。 - 提取距离最小的节点,更新其邻居。
- 重复直到队列为空。
结果:所有节点的最短路径被正确计算。
5. 示例:负权图(无负环)
考虑如下图:
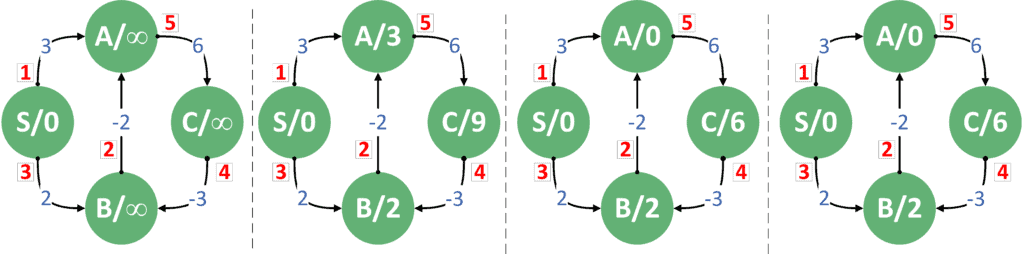
Bellman-Ford 算法流程:
- 初始化所有节点为 ∞,起点为 0。
- 对所有边进行
V - 1次松弛操作。 - 第
V次若仍有更新,说明存在负环。
结果:所有节点的最短路径正确,且无负环。
6. 示例:含负环图
考虑如下图:
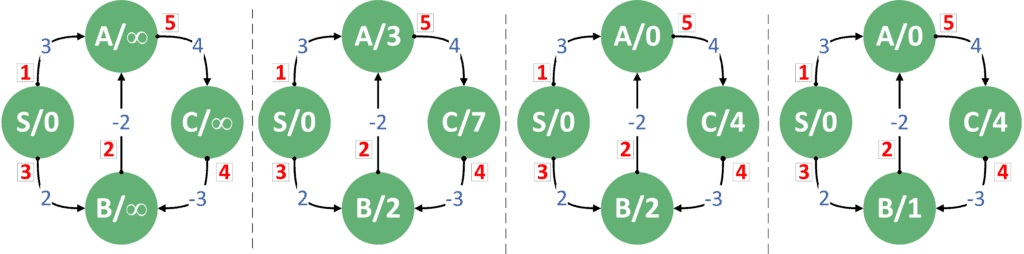
Bellman-Ford 算法流程:
- 执行
V - 1次松弛操作。 - 再次执行一次松弛操作。
- 若仍有更新,说明存在负环。
结果:检测出负环 ACB,路径权值持续下降。
7. 对比总结
| 特性 | Dijkstra | Bellman-Ford |
|---|---|---|
| 非负权图 | ✅ 支持 | ✅ 支持 |
| 负权边 | ❌ 不支持 | ✅ 支持(仅限有向图) |
| 负权环检测 | ❌ 不支持 | ✅ 支持 |
| 时间复杂度 | O(V + E log V) |
O(V * E) |
| 适用图类型 | 有向/无向图 | 有向图(负权边) |
8. 适用场景建议
✅ 使用 Dijkstra 的场景:
- 图中无负权边。
- 需要高效计算单源最短路径。
- 稀疏图(边数远小于节点数平方)。
✅ 使用 Bellman-Ford 的场景:
- 图中存在负权边。
- 需要检测负权环。
- 边数不多,图结构相对简单。
9. 小结
- Dijkstra 算法效率高,适用于大多数无负权图场景。
- Bellman-Ford 算法更灵活,能处理负权边并检测负环,但性能较差。
- 根据图的结构和需求选择合适的算法是关键。
✅ 踩坑提醒:
- 使用 Dijkstra 时务必确保图中无负权边,否则结果不可靠。
- Bellman-Ford 虽支持负权边,但不能处理无向图中的负权边,否则会误判为负环。
10. 附录:代码示例(Java)
Dijkstra 示例
import java.util.*;
public class Dijkstra {
static class Edge {
int to, weight;
Edge(int to, int weight) {
this.to = to;
this.weight = weight;
}
}
public static void dijkstra(List<List<Edge>> graph, int start) {
int n = graph.size();
int[] dist = new int[n];
Arrays.fill(dist, Integer.MAX_VALUE);
dist[start] = 0;
PriorityQueue<int[]> pq = new PriorityQueue<>(Comparator.comparingInt(a -> a[1]));
pq.offer(new int[]{start, 0});
while (!pq.isEmpty()) {
int u = pq.poll()[0];
for (Edge e : graph.get(u)) {
if (dist[e.to] > dist[u] + e.weight) {
dist[e.to] = dist[u] + e.weight;
pq.offer(new int[]{e.to, dist[e.to]});
}
}
}
System.out.println("Shortest distances from source:");
for (int i = 0; i < n; i++) {
System.out.println("Node " + i + ": " + dist[i]);
}
}
}
Bellman-Ford 示例
import java.util.*;
public class BellmanFord {
static class Edge {
int from, to, weight;
Edge(int from, int to, int weight) {
this.from = from;
this.to = to;
this.weight = weight;
}
}
public static boolean bellmanFord(List<Edge> edges, int n, int start) {
int[] dist = new int[n];
Arrays.fill(dist, Integer.MAX_VALUE);
dist[start] = 0;
for (int i = 0; i < n - 1; i++) {
for (Edge e : edges) {
if (dist[e.from] != Integer.MAX_VALUE && dist[e.to] > dist[e.from] + e.weight) {
dist[e.to] = dist[e.from] + e.weight;
}
}
}
// 检查负环
for (Edge e : edges) {
if (dist[e.from] != Integer.MAX_VALUE && dist[e.to] > dist[e.from] + e.weight) {
System.out.println("Graph contains negative weight cycle");
return false;
}
}
System.out.println("Shortest distances from source:");
for (int i = 0; i < n; i++) {
System.out.println("Node " + i + ": " + dist[i]);
}
return true;
}
}
参考资料:
如需进一步学习图论算法,建议结合实际项目场景进行练习,加深理解。