1. Overview
In this tutorial, we’ll talk about Harris Corner Detection, a mathematical approach to detecting corners in an image. First, we’ll illustrate the mathematical formulation. Then, we’ll show the step-by-step procedure to perform the Harris Corner Detector.
2. Mathematical Formulation
A corner is a point whose local neighborhood is characterized by large intensity variation in all directions. Corners are important features in computer vision because they are points stable over changes of viewpoint and illumination. The so-called Harris Corner Detector was introduced by Chris Harris and Mike Stephens in 1988 in the paper “A Combined Corner and Edge Detector”.
Let’s consider a two-dimensional image  and a patch
and a patch  of size
of size  centered in
centered in  . We want to evaluate the intensity variation occurred if the window is shifted by a small amount
. We want to evaluate the intensity variation occurred if the window is shifted by a small amount  . Such variation can be estimated by computing the Sum of Squared Differences (SSD):
. Such variation can be estimated by computing the Sum of Squared Differences (SSD):
(1) ![\begin{equation*} \hbox{SSD}(u, v)=\sum_{\left(x, y)\right \in W} g(x,y) \left[I\left(x, y\right)-I\left(x+u, y+v\right)\right]^{2} \end{equation*}](/wp-content/ql-cache/quicklatex.com-e5d4afae4f083fc47f09d1fe8f8c24a5_l3.svg "Rendered by QuickLaTeX.com")
where  is a window function that can be a rectangular or a Gaussian function. We need to maximize the function
is a window function that can be a rectangular or a Gaussian function. We need to maximize the function  for corner detection. Since
for corner detection. Since  and
and  are small, the shifted intensity
are small, the shifted intensity  can be approximated by the following first-order Taylor expansion:
can be approximated by the following first-order Taylor expansion:
(2) 
where  and
and  are partial derivatives of in
are partial derivatives of in  and
and  direction, respectively. By substituting (2) in (1) we obtain:
direction, respectively. By substituting (2) in (1) we obtain:
(3) ![\begin{equation*} \hbox{SSD}(u, v) \approx \sum_{\left(x, y)\right \in W} g(x, y)\left[u^{2} I_{x}^{2}+2 u v I_{x} I_{y}+v^{2} I_{y}^{2}\right] . \end{equation*}](/wp-content/ql-cache/quicklatex.com-c19bf287f07688c042b27cf02c4c9b49_l3.svg "Rendered by QuickLaTeX.com")
The equation (3) can be expressed in the following matrix form:
(4) ![\begin{equation*} \hbox{SSD}(u, v) \approx\left[\begin{array}{ll} u & v \end{array}\right] M\left[\begin{array}{l} u \\ v \end{array}\right] \end{equation*}](/wp-content/ql-cache/quicklatex.com-6a1743d64a40a4090489993c1607fa32_l3.svg "Rendered by QuickLaTeX.com")
where  is a
is a  matrix computed from image derivatives:
matrix computed from image derivatives:
(5) ![\begin{equation*} M=\sum_{\left(x, y)\right \in W}g(x, y)\left[\begin{array}{ll} I_{x} I_{x} & I_{x} I_{y} \\ I_{x} I_{y} & I_{y} I_{y} \end{array}\right] \end{equation*}](/wp-content/ql-cache/quicklatex.com-11af96f0ae425e7dfdfa94502e840c4b_l3.svg "Rendered by QuickLaTeX.com")
The matrix is called structure tensor.
The Harris detector uses the following response function that scores the presence of a corner within the patch:
(6) 
 is a constant to chose in the range
is a constant to chose in the range ![[0.04, 0.06]](/wp-content/ql-cache/quicklatex.com-110b19ea7018536cb74ebadce0a2fbad_l3.svg "Rendered by QuickLaTeX.com") . Since is a symmetric matrix,
. Since is a symmetric matrix,  and
and  where
where  and
and  are the eigenvalues of . Hence, we can express the corner response as a function of the eigenvalues of the structure tensor:
are the eigenvalues of . Hence, we can express the corner response as a function of the eigenvalues of the structure tensor:
(7) 
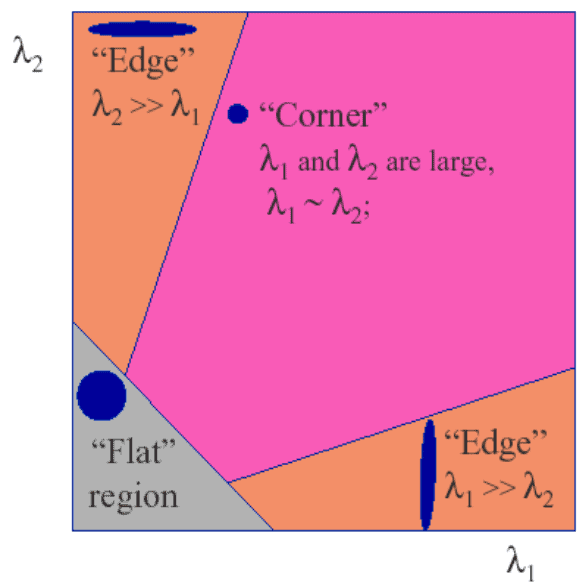
So the eigenvalues determine whether a region is an edge, a corner or flat:
- if and are small, then
 is small and the region is flat;
is small and the region is flat; - if
 or viceversa, then
or viceversa, then  and the region is an edge;
and the region is an edge; - if
 and both eigenvalues are large, then R is large and the region is a corner.
and both eigenvalues are large, then R is large and the region is a corner.
The classification of the points using the eigenvalues of the structure tensor is represented in the following figure:
3. Algorithm
Harris corner detector consists of the following steps.
- Convert the original image into a grayscale image . The pixel values of are computed as a weighted sum of the corresponding
 ,
,  ,
,  values: (8)
values: (8) 
- Compute the derivatives and by convolving the image with the Sobel operator: (9)

- Compute the products of the derivatives
 ,
,  ,
,  .
. - Convolve the images , , with a Gaussian filter or a mean filter. Define the structure tensor for each pixel as expressed in eq. (5).
- Compute the response function for each pixel: (10)
- Set a threshold
 on the value of and find pixels with responses above this threshold. Finally, compute the non-max suppression in order to pick up the optimal corners.
on the value of and find pixels with responses above this threshold. Finally, compute the non-max suppression in order to pick up the optimal corners.
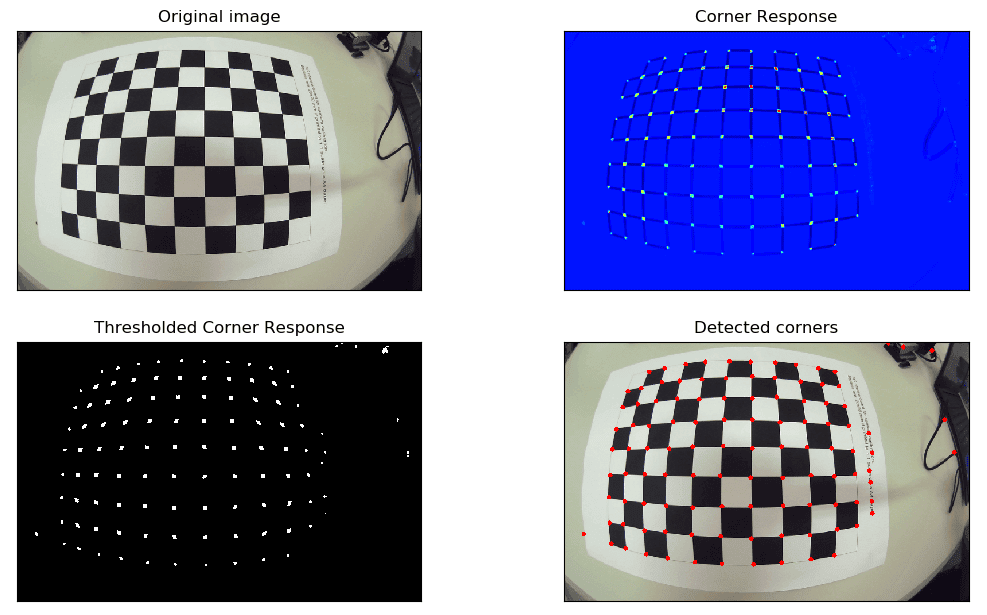
4. Example
In the following figure we show a real application of the Harris Corner Detector. The corner response map (top-right image) was computed using Eq. 10 with k=0.04. The bottom-left image represents the thresholded corner response obtained with  . The detected corners obtained after the application of the non-max suppression are shown in the bottom-right image.
. The detected corners obtained after the application of the non-max suppression are shown in the bottom-right image.
5. Conclusion
In this article, we reviewed the Harris Corner Detector, a fundamental technique in computer vision. We explained the mathematical formulation, and finally, we explained how to implement it.