1. 引言
在本文中,我们将介绍加权图(Weighted Graph)与非加权图(Unweighted Graph),并解释它们之间的区别。同时,我们会展示在程序中如何表示这两种图结构。
2. 什么是图?
图(Graph)是一组相互连接的对象的集合。这些对象可以是数学概念,也可以是现实世界中的实体或现象。例如,一组有亲属关系的人构成一个图;城市之间通过道路连接也构成一个图。
通常,我们将图中的对象称为节点(Node)或顶点(Vertex),连接这些对象的线称为边(Edge)或弧(Arc)。例如,城市与道路之间的图可以这样可视化:
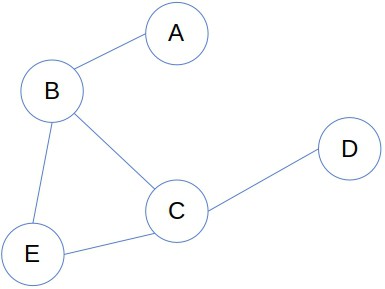
每个节点代表一个城市,每条边代表两个城市之间的一条道路。
3. 非加权图
如果我们只关心两个节点之间是否有连接,而不关心连接的其他属性,这样的图称为非加权图。对于两个直接相连的节点,我们称它们为相邻节点(Adjacent)或邻居(Neighbor)。
3.1. 邻接矩阵(Adjacency Matrix)
非加权图可以用邻接矩阵表示。这是一个 n x n 的矩阵(n 为节点数量),其中的元素为 0 或 1。如果 a[i][j] == 1,表示第 i 个节点和第 j 个节点之间有边;如果为 0,则没有。
以下是非加权图的邻接矩阵示例:
$$ \bordermatrix{ & A & B & C & D & E \cr A & 0 & 1 & 0 & 0 & 0 \cr B & 1 & 0 & 1 & 0 & 1 \cr C & 0 & 1 & 0 & 1 & 1 \cr D & 0 & 0 & 1 & 0 & 0 \cr E & 0 & 1 & 1 & 0 & 0 } $$
该矩阵是对称的,适用于无向图(Undirected Graph)。
使用邻接矩阵有两个前提:
✅ 能将节点映射为唯一的整数编号
✅ 节点数量足够小,使得内存可以容纳 n x n 矩阵
如果这些条件不满足,或者图是稀疏的(Sparse),我们通常使用邻接表(Adjacency List)。
3.2. 邻接表(Adjacency List)
邻接表为每个节点维护一个链表,记录它的所有邻居节点:
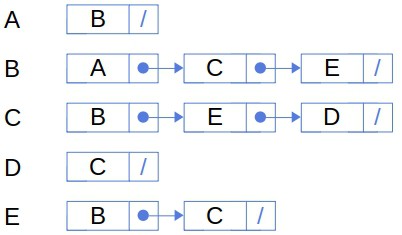
邻接表的优点是存储空间不连续,适合稀疏图。但缺点是查询两个节点是否相连的时间复杂度不再是 O(1),最坏情况下可能需要遍历整个链表。
例如,如果节点 i 几乎连接了所有节点,但唯独没有连接 j,那么我们最多需要检查 n-2 个元素才能确定它们不相邻。
4. 加权图
非加权图只能告诉我们两个节点是否相连,适用于以下问题:
- 从节点
u到v是否存在路径? - 从
u出发可以到达哪些节点? u和v之间的最短路径包含多少个节点?
但在许多实际应用中,边是有数值属性的。例如,寻找城市之间的最短路径时,必须考虑道路长度和交通密度。我们为每条边 e 分配一个实数 w(e),称为权重(Weight)。这种图称为加权图(Weighted Graph)。
下图是加权图的示例,边上的数字代表道路长度:
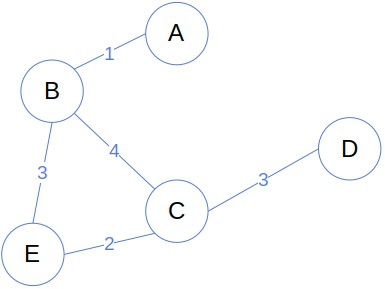
权重可以表示各种实际意义:长度、密度、时间、成本、概率等。
4.1. 加权图的表示方式
加权图的表示方式是对非加权图的扩展:
- 权重矩阵(Weight Matrix):是一个
n x n的实数矩阵,其中w[i][j]表示节点i与j之间的边的权重。通常,0 表示没有边,正数表示存在边。如果允许负权边,需定义一个特殊符号(如INF)表示无边。
权重矩阵示例如下:
$$ \bordermatrix{ & A & B & C & D & E \cr A & 0 & 1 & 0 & 0 & 0 \cr B & 1 & 0 & 4 & 0 & 3 \cr C & 0 & 4 & 0 & 3 & 2 \cr D & 0 & 0 & 3 & 0 & 0 \cr E & 0 & 3 & 3 & 0 & 0 } $$
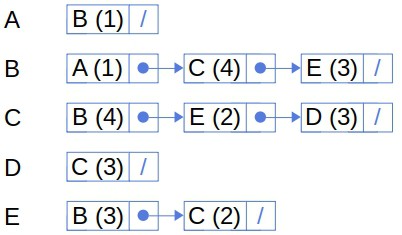
- 邻接表:在链表中保存邻居节点的同时,也保存对应的边的权重:
4.2. 非加权图作为加权图的特例
非加权图也可以看作是一种特殊的加权图,其权重函数定义如下:
$$ w(u, v) = \begin{cases} 0, & u \text{ 和 } v \text{ 不相连} \ 1, & u \text{ 和 } v \text{ 相连} \end{cases} $$
此外,如果所有边的权重相同,或者路径成本只取决于节点数量,我们可以使用非加权图算法,稍后再计算权重。
4.3. 显式图与隐式图
加权图和非加权图都可以是显式图(Explicit Graph)或隐式图(Implicit Graph)。
- 显式图:节点和边可以在程序运行前全部枚举并存储在内存中。例如,城市与道路图。
- 隐式图:图结构非常庞大或复杂,无法提前完整构建。我们通过某种函数动态生成图的节点和边。例如,在 AI 搜索问题中,每个候选解是一个节点,搜索时动态生成邻居节点。
⚠️ 隐式图的概念类似于数据库中的懒加载(Lazy Loading),而显式图则类似于急加载(Eager Loading)。
5. 总结
- 非加权图适用于只需知道节点之间是否连接的场景。
- 加权图适用于边具有数值属性的情况,如成本、长度等。
- 图的表示方式包括邻接矩阵和邻接表,各有优劣。
- 加权图可以看作是非加权图的扩展。
- 图可以是显式的(完整构建)或隐式的(动态生成)。
✅ 在选择图结构和表示方式时,应根据具体应用场景进行权衡。