1. 概述
组合优化问题(Combinatorial Optimization Problems,简称 COP)在现实世界中有着广泛的应用。从物流配送到任务调度,COP 的解决方案直接影响着效率和成本。本文将介绍几种典型的组合优化问题及其求解方法,并通过一个经典问题 —— 旅行商问题(TSP)来展示其复杂性和解决思路。
2. 什么是组合优化问题
组合优化的核心是:在有限且固定的组合中寻找最优解。这类问题通常使用图论或线性规划进行建模。
COP 常见于以下场景:
- 货物配送路径优化
- 最短路径问题
- 工人任务分配
这些问题通过优化组合选择,帮助我们降低时间或成本开销。
以下是一些常见的建模方式:
✅ 最小生成树(Minimum Spanning Tree, MST)
给定一个连通无向图 G,MST 是连接所有顶点的子图,且其总权重最小。
✅ 旅行商问题(Traveling Salesman Problem, TSP)
经典的组合优化问题,广泛应用于运筹学和算法研究中,将在下文详细介绍。
✅ 背包问题(Knapsack Problem)
在资源有限的条件下如何选择物品以最大化收益,常见于计算机科学、密码学和应用数学领域。
3. TSP:一个具有挑战性的问题
TSP 问题描述如下:一个旅行商需要访问多个城市,每座城市只能访问一次,最后要回到起点城市。目标是找到总路径最短的访问顺序。
我们将在下面给出其数学定义,并通过一个具体示例说明其计算复杂性。
3.1. 数学定义
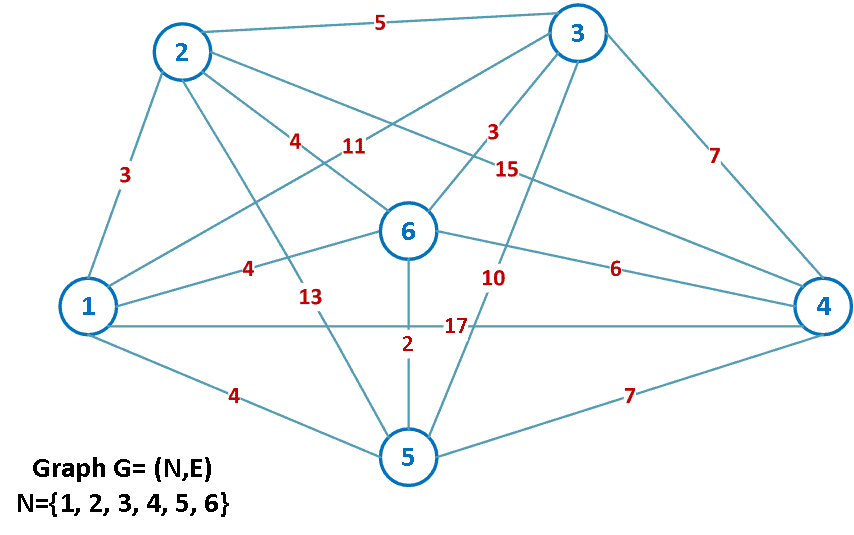
通常我们使用图 G(N, E) 来建模 TSP:
- N 表示城市集合(顶点)
- E 表示城市之间的距离(边)
图示如下:
3.2. 示例分析
我们以 n = 6 个城市为例,假设计算机每微秒可以评估一条路径。
要穷举所有可能路径并找出最优解,我们需要计算:
$$ \frac{(n-1)!}{2} = \frac{(6-1)!}{2} = 60 \text{ 条路径} $$
计算时间:60 微秒。
但当城市数量增加时,计算量急剧上升:
| 城市数 n | 可能路径数 | 计算时间 |
|---|---|---|
| 5 | 12 | 12 微秒 |
| 10 | 181,440 | 0.18 秒 |
| 15 | 430 亿 | 12 小时 |
| 20 | 6×10¹⁶ | 19 个世纪 |
| 25 | 3×10²³ | 98 亿年 |
| 30 | 4×10³⁰ | 140 万 × 10⁹ 世纪 |
⚠️ 可以看出,随着城市数量增加,TSP 的复杂度呈阶乘级增长,属于典型的 NP-Hard 问题。
4. COP 的求解方法
由于组合优化问题的复杂度极高,尤其是像 TSP 这类 NP-Hard 问题,直接穷举所有组合是不可行的。因此我们通常采用以下两类方法来求解:
4.1. 精确解法(Exact Methods)
这类方法可以保证找到全局最优解,但计算复杂度高,适合小规模问题:
- 分支限界法(Branch and Bound)
- 动态规划(Dynamic Programming)
✅ 优点:准确,保证最优解
❌ 缺点:计算开销大,不适合大规模问题
4.2. 近似解法(Approximate Methods)
这类方法以牺牲最优性为代价,换取计算效率的提升,适用于大规模问题:
4.2.1 启发式算法(Heuristics)
针对特定问题设计的高效算法,例如:
- 最近邻法(Nearest Neighbor)
- 插入法(Insertion Heuristics)
4.2.2 元启发式算法(Metaheuristics)
通用性强,适用于多种组合优化问题,例如:
- 模拟退火(Simulated Annealing)
- 遗传算法(Genetic Algorithm)
- 禁忌搜索(Tabu Search)
- 蚁群算法(Ant Colony Optimization)
✅ 优点:速度快,适合大规模问题
❌ 缺点:无法保证最优解,可能陷入局部最优
5. 小结
本文介绍了组合优化问题的基本概念,包括其典型应用场景和建模方式。我们以 TSP 为例,展示了其计算复杂度之高,并探讨了两类主要的求解策略:
- 精确解法适用于小规模问题,能保证最优解
- 近似解法适用于大规模问题,牺牲最优性换取效率
对于实际工程应用,推荐根据问题规模和精度要求灵活选择算法。对于 TSP 等复杂问题,元启发式算法往往是首选,尤其是模拟退火、遗传算法等,它们在实践中表现良好。