1. 简介
设想我们有一组分布在二维平面上的点,想要将它们连接起来形成一个闭合图形。要实现这个目标,第一步就是对这些点进行排序。
在本文中,我们将介绍一种将二维点集按顺时针顺序排序的方法。这种方法适用于围绕一个中心点进行排序的场景,中心点可以是原点,也可以是任意指定的点。我们将以点集的均值作为中心点进行排序。
2. 问题描述
目标:给定一组二维点(每个点由 x 和 y 坐标表示),将这些点按顺时针顺序排序。
我们需要围绕一个中心点来观察这些点。这个中心点可以是原点 (0, 0),也可以是任意其他点。在本文中,我们采用点集的均值作为中心点:
center_x = sum(x_i) / n
center_y = sum(y_i) / n
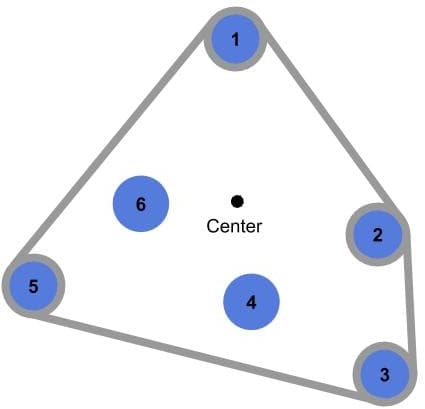
需要注意的是,我们并不是在计算凸包(convex hull),而是希望找到一条穿过所有点的闭合路径。如下图所示,即使点分布不规则,只要能形成闭合路径即可接受:
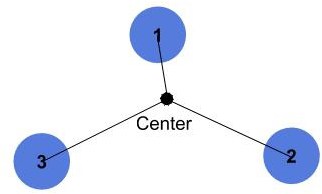
与之对比,如果计算凸包,只会保留外围的点,例如下面的图中只保留了点 1、2、3 和 5:
此外,我们不处理所有点共线的极端情况。
3. 算法思路
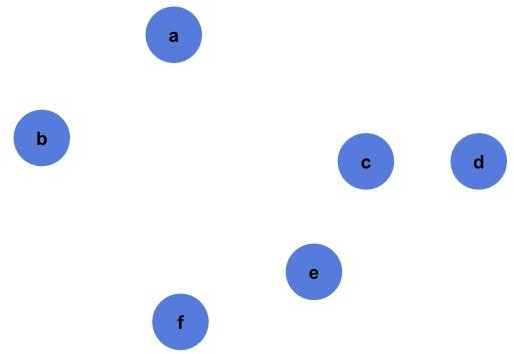
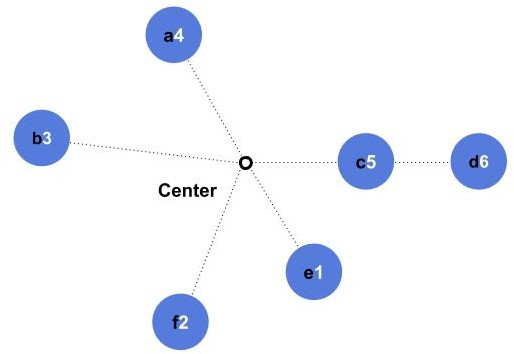
以一组点 a, b, c, d, e, f 为例,如下图所示:
3.1 步骤概览
- 计算中心点:将所有点的 x 和 y 坐标求和后取平均。
- 平移坐标系:将所有点相对于中心点平移,使中心点位于原点
(0, 0)。 - 计算角度:使用
atan2(y, x)计算每个点相对于中心点的角度。 - 排序逻辑:
- 角度小的点排在前面(顺时针方向)。
- 如果角度相同,距离中心点近的点排在前面。
- 恢复坐标系:将排序后的点重新平移回原坐标系。
3.2 示例说明
以下图为例:
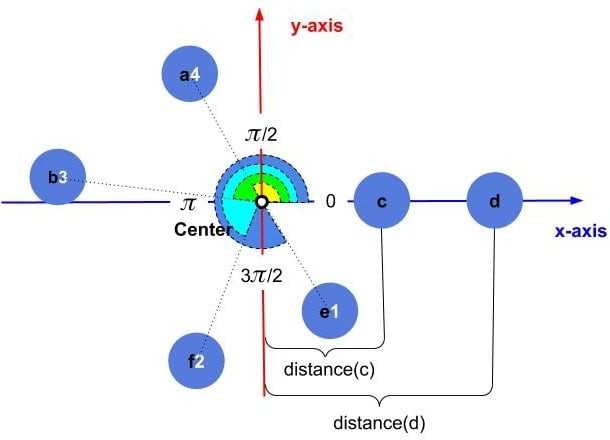
- 点
e在第四象限,角度最大,排在第一位。 - 点
f在第三象限,角度次之,排在第二位。 - 点
b和a在第二象限,但b更靠近 π,所以排在a前面。 - 点
c和d在第一象限,角度相同,按距离排序,c更近,排在d前面。
最终排序顺序为:e, f, b, a, c, d
4. 算法流程图
4.1 总体流程图
graph TD
A[输入点集] --> B[计算中心点]
B --> C[将所有点平移至中心点为原点]
C --> D[调用排序算法]
D --> E[恢复点集坐标]
E --> F[输出排序结果]
4.2 比较函数流程图
graph TD
G[比较两个点 pt1 和 pt2] --> H[计算 pt1 和 pt2 的角度]
H --> I{pt1_angle < pt2_angle ?}
I -->|是| J[pt1 排在前面]
I -->|否| K[比较距离]
K --> L{pt1_distance < pt2_distance ?}
L -->|是| M[pt1 排在前面]
L -->|否| N[pt2 排在前面]
5. 伪代码实现
5.1 主排序算法
algorithm sortPointsCW(Points):
// INPUT
// Points = 一组二维点
// OUTPUT
// 按顺时针顺序排序后的点集
pt_center <- (0, 0)
for pt in Points:
pt_center.x += pt.x
pt_center.y += pt.y
n <- 点的数量
pt_center.x /= n
pt_center.y /= n
for pt in Points:
pt.x -= pt_center.x
pt.y -= pt_center.y
sort Points using comparePoints function
for pt in Points:
pt.x += pt_center.x
pt.y += pt_center.y
return Points
5.2 比较函数
function comparePoints(pt1, pt2):
// INPUT
// pt1, pt2 = 要比较的两个点(已平移至原点)
// OUTPUT
// 若 pt1 应该在 pt2 前面则返回 true
angle1 <- getAngle(pt1)
angle2 <- getAngle(pt2)
if angle1 < angle2:
return true
if angle1 == angle2:
d1 <- getDistance(pt1)
d2 <- getDistance(pt2)
if d1 < d2:
return true
return false
5.3 计算角度
function getAngle(pt):
// INPUT
// pt = 当前点
// OUTPUT
// 返回从 x 轴正方向顺时针旋转到该点的角度 (0~2π)
x <- pt.x
y <- pt.y
angle <- atan2(y, x)
if angle < 0:
angle += 2 * π
return angle
5.4 计算距离
function getDistance(pt):
// INPUT
// pt = 当前点
// OUTPUT
// 返回该点到原点的欧氏距离
return sqrt(pt.x^2 + pt.y^2)
✅ 优化提示:在比较距离时,可以只比较平方距离,避免开平方运算,提升性能。
6. 算法复杂度分析
6.1 时间复杂度
- 中心点计算:✅
O(n) - 平移操作:✅
O(n) - 排序操作:取决于排序算法,若使用快排,则为 ✅
O(n log n) - 总体时间复杂度:✅
O(n log n)
6.2 空间复杂度
- 仅需常量空间存储中心点坐标,✅
O(1)
7. 小结
本文介绍了一种将二维点集按顺时针顺序排序的通用方法。核心思想是:
- 以点集均值为参考中心点
- 将点集平移至以中心点为原点
- 使用角度和距离作为排序依据
- 使用任意排序算法完成排序
- 最后将点集恢复至原坐标系
该方法简单、直观,适用于图形绘制、路径规划等需要闭合路径的场景。
⚠️ 踩坑提醒:注意
atan2返回的是[-π, π],需转换为[0, 2π]才能正确排序。
✅ 推荐优化:在比较距离时使用平方距离,避免不必要的开平方运算。