1. 简介
在本文中,我们将探讨约束满足问题(Constraint Satisfaction Problems,CSPs)的基本概念,并介绍一种通用的回溯算法(Backtracking Algorithm)来求解这类问题。CSP 是一类在人工智能、运筹学和组合优化中非常常见的问题类型,广泛应用于排班、资源分配、逻辑谜题求解等场景。
回溯算法是解决 CSP 的基础方法之一。它通过系统地尝试所有可能的变量赋值组合,同时利用约束条件进行剪枝,从而高效地搜索解空间。
2. 约束满足问题(CSP)
一个 CSP 包含以下三个核心组成部分:
- 变量集合:$$ \mathcal{X} = {X_1, X_2, \ldots, X_n} $$
- 变量的定义域集合:$$ \mathcal{D} = {D_1, D_2, \ldots, D_n} $$
- 约束集合:$$ \mathcal{C} = {C_1, C_2, \ldots, C_m} $$
每个约束 $$ C_k $$ 描述了若干变量之间必须满足的关系。我们的目标是为每个变量分配一个值,使得所有约束都得到满足。
2.1 示例:数独(Sudoku)
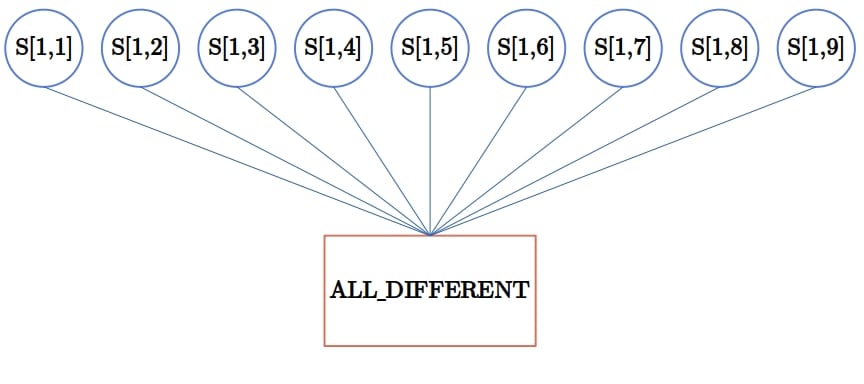
数独是一个典型的 CSP 问题。在 9×9 的棋盘中,每个格子可以看作是一个变量 $$ S[i,j] $$。每个变量的取值范围是 1 到 9。
我们有以下三类约束:
- 每一行中的数字必须互不相同
- 每一列中的数字必须互不相同
- 每个 3×3 子块中的数字必须互不相同
这些约束可以用一个统一的全局约束 ALL_DIFFERENT(x1, x2, ..., xn) 来表示,表示其中所有变量的值都互不相同。
整个数独问题可以表示为 27 个这样的 ALL_DIFFERENT 约束。
2.2 CSP 作为搜索问题
CSP 可以被建模为一个搜索问题,其中:
- 每个节点代表一个变量赋值状态(可以是部分或完整)
- 边表示对一个变量的赋值变化
- 起始节点是空赋值(所有变量未赋值)
- 目标节点是满足所有约束的完整赋值
2.3 CSP 与经典搜索问题的区别
与经典搜索问题相比,CSP 有以下两个关键区别:
✅ 变量赋值顺序无关紧要
在 CSP 中,先给哪个变量赋值不影响最终解,只要所有变量都被正确赋值即可。
❌ 解决方案是结构性的
与路径搜索不同,CSP 的解是一个变量赋值集合,而不是动作的有序序列。
✅ 算法能“看到”解的结构
CSP 求解器知道每个变量的取值情况,并可以逐个设置变量,而传统搜索算法只将解视为黑盒。
3. 约束图(Constraint Graph)
我们可以用图来表示 CSP 的结构:
- 图中的节点表示变量
- 边表示两个变量之间的二元约束
- 如果存在涉及多个变量的高阶约束(如
ALL_DIFFERENT),则使用超图(hypergraph)表示
例如,数独中的每个 3×3 块约束可以表示为一个超边,连接 9 个变量节点。
虽然我们可以通过引入辅助变量将高阶约束转化为二元约束,但保留高阶约束往往更直观,也更容易实现高效的求解策略。
4. 回溯求解器(Backtracking Solver)
回溯算法是一种深度优先搜索策略,用于求解 CSP。其核心思想是:
- 从空赋值开始
- 逐个为变量赋值
- 每次赋值时只选择与当前已赋值变量一致的值
- 如果无法继续赋值,就回溯(backtrack)并尝试其他值
4.1 伪代码
algorithm BacktrackingForConstraintSatisfaction(csp):
assignment <- make an empty assignment
return BACKTRACK(csp, assignment)
algorithm BACKTRACK(csp, assignment):
if assignment is complete:
return assignment
var <- SELECT-UNASSIGNED-VARIABLE(csp, assignment)
for value in ORDER-VALUES(csp, var, assignment):
if value is consistent with assignment:
add {var = value} to assignment
inferences <- INFERENCE(csp, var, assignment)
if inferences != failure:
add inferences to csp
result <- BACKTRACK(csp, assignment)
if result != failure:
return result
remove inferences from csp
remove {var = value} from assignment
return failure
4.2 推理(Inference)
推理是回溯算法中提升效率的重要步骤。当为一个变量赋值后,我们可以:
- 检查与该变量相连的所有其他变量
- 从它们的定义域中移除不一致的值(前向检查,Forward Checking)
- 进一步传播这些变化,检查邻居的邻居,实现更深层次的剪枝
4.3 变量选择策略
变量选择策略影响搜索效率。常见策略包括:
✅ 最小剩余值(MRV,Minimum Remaining Values)
优先选择当前定义域最小的变量。因为这些变量最容易导致冲突,尽早处理可以更快剪枝。
⚠️ 静态顺序或随机选择
效率较低,不推荐。
4.4 值排序策略
值排序策略决定在给变量赋值时尝试值的顺序。常用策略:
✅ 最少限制值(LCV,Least Constraining Value)
优先选择对其他变量影响最小的值。这样可以让后续搜索空间尽可能大,增加找到解的概率。
⚠️ 注意:LCV 要求 CSP 是二元的,而 MRV 不受此限制。
5. 总结
本文介绍了约束满足问题(CSP)的基本概念和回溯求解方法。我们还讨论了以下提升求解效率的关键策略:
- 推理(Inference):通过前向检查和约束传播减少搜索空间
- 变量选择:MRV 策略加快剪枝速度
- 值排序:LCV 策略提高找到解的概率
这些启发式策略的结合,使得回溯算法在解决实际 CSP 问题时具有很高的效率。理解这些策略的原理和应用场景,有助于我们在实际开发中更高效地解决类似问题,如排班、任务分配、逻辑谜题等。