1. 引言
图是一种非常灵活且用途广泛的数据结构。它可以用于表示社交网络中的人际关系、地图中的道路连接等多种场景。在实际应用中,图的结构和性质决定了其适用性。
我们可以通过邻接矩阵或边列表等方式构建图结构,同时图的特性也多种多样,比如边的权重(Weighted)、图的稠密度(Dense / Sparse)等。此外,根据节点之间的连接方式,图还可以被进一步细分为不同的序列类型,如路径(Path)、回路(Circuit)、环路(Cycle)等。
本文将从基础图概念讲起,逐步深入探讨这些常见的图序列类型,帮助你系统地理解它们之间的区别与联系。
2. 图的基本概念
图由节点(Vertex)和边(Edge)构成。节点是图的基本组成单位,代表某种对象;边则表示两个节点之间的关系。
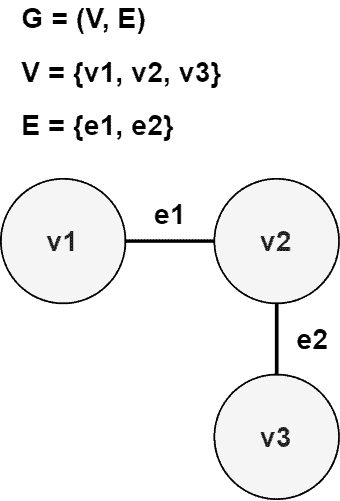
通常我们用 G = (V, E) 表示一个图,其中:
V = {v₁, v₂, ..., vₙ}表示节点集合E = {e₁, e₂, ..., eₙ}表示边集合
图中可以没有边,但至少要有一个节点。没有节点的图称为空图(Null Graph),没有边但有节点的图称为平凡图(Trivial Graph)。
如下图所示,是一个典型的简单图结构:
3. 路径(Path)
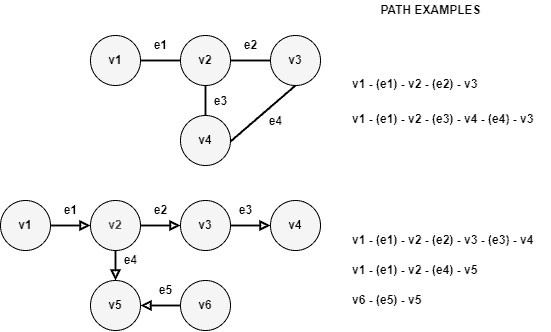
路径是一系列不重复节点通过图中存在的边连接而成的序列。
在无向图中,路径的首尾节点度数为 1,中间节点度数为 2。在有向图中,这种路径被称为有向路径(Dipath),要求所有边方向一致。
例如:
通过分析路径,我们可以得出以下结论:
- 若任意两节点之间存在无向路径(忽略方向),则该有向图是弱连通的
- 若每条路径都有对应的反向路径,则该图是强连通的
- 若两个节点之间存在一条或多条路径,则它们之间的距离定义为最短路径的长度(若无路径则为无穷大)
4. 回路(Circuit)
回路是一条起点和终点相同的节点序列,且不重复边,但允许重复节点。
常见回路类型包括:
- 欧拉回路(Eulerian Circuit):经过图中每条边一次且仅一次的闭合路径
- 哈密尔顿回路(Hamiltonian Circuit):经过图中每个节点一次且仅一次的闭合路径
例如:
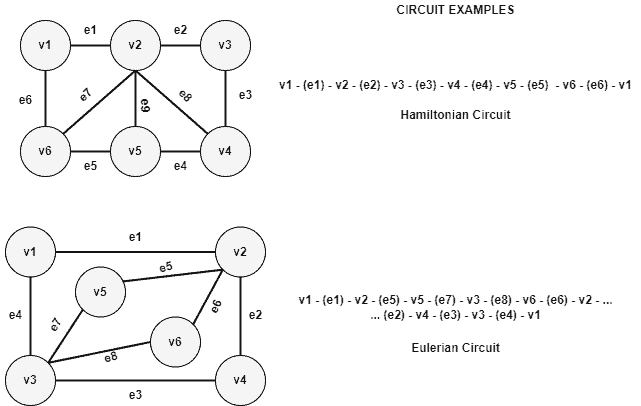
注意:
- 第一张图是哈密尔顿回路图,但不是欧拉回路图
- 第二张图是欧拉回路图,但不是哈密尔顿回路图
5. 环路(Cycle)
环路是一组相邻且互不重复的节点构成的序列,首尾节点相同。
也就是说,环路是一种特殊的回路,它不允许重复节点(首尾节点除外)。
结论:
- 每个环路都是回路,但不是每个回路都是环路
- 每个哈密尔顿回路也一定是环路
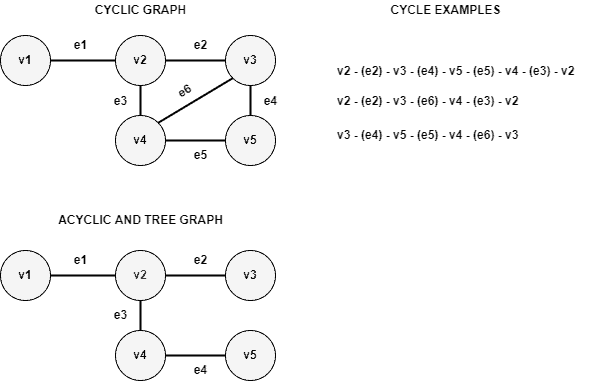
根据是否包含环路,图可分为:
- 有环图(Cyclic Graph)
- 无环图(Acyclic Graph)
特别地,无环的连通图称为树(Tree)
如下图所示:
✅ 小贴士:在并发系统中,使用-等待图(Wait-for Graph)中出现环路意味着死锁(Deadlock)发生。
6. 其他序列:游走(Walk)与迹(Trail)
除了前面提到的路径、回路、环路外,图中还存在两种更基础的序列:
6.1 游走(Walk)
游走是最一般的序列类型,允许节点和边重复。
分为:
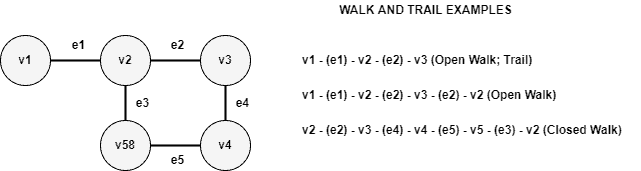
- 开游走(Open Walk):起点和终点不同
- 闭游走(Closed Walk):起点和终点相同
6.2 迹(Trail)
迹是一种不重复边的开游走,但允许重复节点。
例如:
7. 总结对比表
| 类型 | 是否允许重复节点 | 是否允许重复边 | 是否闭合 |
|---|---|---|---|
| 游走(Walk) | ✅ | ✅ | ✅(开/闭) |
| 迹(Trail) | ✅ | ❌ | ❌(开) |
| 路径(Path) | ❌ | ❌ | ❌(开) |
| 回路(Circuit) | ✅ | ❌ | ✅(闭) |
| 环路(Cycle) | ❌(首尾相同) | ❌ | ✅(闭) |
⚠️ 注意:闭合序列不允许重复节点,唯一例外是首尾节点必须相同。
8. 结论
通过本文的系统梳理,我们了解了图中常见的几种节点序列类型及其区别。这些概念在图论中非常重要,尤其是在以下场景中:
- 检测使用-等待图中的死锁(通过检测环路)
- 寻找最短路径或最优路径(如旅行商问题 Traveling Salesman Problem)
- 判断图的连通性
掌握这些基本概念,有助于你在实际开发中更好地设计图结构、优化算法逻辑,避免踩坑。